Driver Development
Driver Model
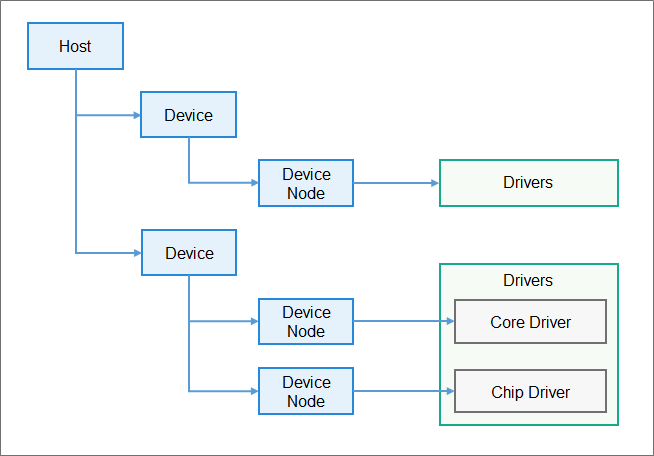
The Hardware Driver Foundation (HDF) is designed upon a component-based driver model. This model enables refined driver management and streamlines driver development and deployment. In the HDF, the same type of device drivers are placed in a host. You can develop and deploy the drivers separately. One driver can have multiple nodes.
The figure below shows the HDF driver model.
Figure 1 HDF driver model
How to Develop
The HDF-based driver development involves driver implementation and configuration. The procedure is as follows:
-
Implement a driver.
Write the driver code and register the driver entry with the HDF.-
Writing the driver service code
The following is an example:
#include "hdf_device_desc.h" // Header file that defines the driver development APIs provided by the HDF. #include "hdf_log.h" // Header file that defines the log APIs provided by the HDF. #define HDF_LOG_TAG "sample_driver" // Tag contained in logs. If no tag is not specified, the default HDF_TAG is used. // Bind the service interface provided by the driver to the HDF. int32_t HdfSampleDriverBind(struct HdfDeviceObject *deviceObject) { HDF_LOGD("Sample driver bind success"); return 0; } // Initialize the driver service. int32_t HdfSampleDriverInit(struct HdfDeviceObject *deviceObject) { HDF_LOGD("Sample driver Init success"); return 0; } // Release the driver resources. void HdfSampleDriverRelease(struct HdfDeviceObject *deviceObject) { HDF_LOGD("Sample driver release success"); return; }- Registering the driver entry with the HDF
// Define a driver entry object. It must be a global variable of the HdfDriverEntry type (defined in hdf_device_desc.h). struct HdfDriverEntry g_sampleDriverEntry = { .moduleVersion = 1, .moduleName = "sample_driver", .Bind = HdfSampleDriverBind, .Init = HdfSampleDriverInit, .Release = HdfSampleDriverRelease, }; // Call HDF_INIT to register the driver entry with the HDF. When loading the driver, the HDF calls the Bind() function and then the Init() function. If the Init() function fails to be called, the HDF will call Release() to release driver resources and exit the driver model. HDF_INIT(g_sampleDriverEntry); -
-
Build the driver.
-
LiteOS
Modify makefile and BUILD.gn.-
makefile:
Use the makefile template provided by the HDF to compile the driver code.include $(LITEOSTOPDIR)/../../drivers/adapter/khdf/liteos/lite.mk # Import the content predefined by the HDF. This operation is mandatory. MODULE_NAME := # File to be generated. LOCAL_INCLUDE: = # Directory of the driver header files. LOCAL_SRCS : = # Source code file of the driver. LOCAL_CFLAGS : = # Custom compilation options. include $(HDF_DRIVER) # Import the makefile template to complete the compilation.Add the path of the generated file to hdf_lite.mk in the drivers/adapter/khdf/liteos directory to link the file to the kernel image.
LITEOS_BASELIB += -lxxx # Static library generated by the link. LIB_SUBDIRS += # Directory in which the driver code makefile is located. -
BUILD.gn:
Add BUILD.gn. The content of BUILD.gn is as follows:import("//build/lite/config/component/lite_component.gni") import("//drivers/adapter/khdf/liteos/hdf.gni") module_switch = defined(LOSCFG_DRIVERS_HDF_xxx) module_name = "xxx" hdf_driver(module_name) { sources = [ "xxx/xxx/xxx.c", # Source code to compile. ] public_configs = [ ":public" ] # Head file configuration of the dependencies. } config("public") {# Define the head file configuration of the dependencies. include_dirs = [ "xxx/xxx/xxx", # Directory of the dependency header files. ] }Add the BUILD.gn directory to /drivers/adapter/khdf/liteos/BUILD.gn.
group("liteos") { public_deps = [ ":$module_name" ] deps = [ "xxx/xxx", # Directory where the BUILD.gn of the driver is located. It is a relative path to /drivers/adapter/khdf/liteos. ] }
-
-
Linux
To define the driver control macro, add the Kconfig file to the driver directory xxx and add the path of the Kconfig file to drivers/adapter/khdf/linux/Kconfig.source "drivers/hdf/khdf/xxx/Kconfig" # Kernel directory to which the HDF module is soft linked.Add the driver directory to drivers/adapter/khdf/linux/Makefile.
obj-$(CONFIG_DRIVERS_HDF) += xxx/Add a Makefile to the driver directory xxx and add code compiling rules of the driver to the Makefile file.
obj-y += xxx.o
-
-
Configure the driver.
The HDF Configuration Source (HCS) contains the source code of HDF configuration. For details about the HCS, see Configuration Management.The driver configuration consists of the driver device description defined by the HDF and the private driver configuration.
-
(Mandatory) Setting the driver device description
The HDF loads a driver based on the driver device description defined by the HDF. Therefore, the driver device description must be added to the device_info.hcs file defined by the HDF. The following is an example:root { device_info { match_attr = "hdf_manager"; template host { // Host template. If a node (for example, sample_host) uses the default values in this template, the node fields can be omitted. hostName = ""; priority = 100; uid = ""; // User ID (UID) of a user-mode process. It is left empty by default. If you do not set the value, this parameter will be set to the value of hostName, which indicates a common user. gid = ""; // Group ID (GID) of a user-mode process. It is left empty by default. If you do not set the value, this parameter will be set to the value of hostName, which indicates a common user group. caps = [""]]; // Linux capabilities of a user-mode process. It is left empty by default. Set this parameter based on service requirements. template device { template deviceNode { policy = 0; priority = 100; preload = 0; permission = 0664; moduleName = ""; serviceName = ""; deviceMatchAttr = ""; } } } sample_host :: host{ hostName = "host0"; // Host name. The host node is used as a container to hold a type of drivers. priority = 100; // Host startup priority (0-200). A smaller value indicates a higher priority. The default value 100 is recommended. The hosts with the same priority start based on the time when the priority was configured. The host configured first starts first. caps = ["DAC_OVERRIDE", "DAC_READ_SEARCH"]; // Linux capabilities of the user-mode process. device_sample :: device { // Sample device node. device0 :: deviceNode { // DeviceNode of the sample driver. policy = 1; // Policy for providing the driver service. For details, see Driver Service Management. priority = 100; // Driver startup priority (0-200). A smaller value indicates a higher priority. The default value 100 is recommended. The drivers with the same priority start based on the time when the priority was configured. The driver configured first starts first. preload = 0; // The loading mode of the driver is on-demand loading. For details, see "NOTE" at the end of this document. permission = 0664; // Permission for the driver to create a device node. moduleName = "sample_driver"; // Driver name. The value must be the same as that of moduleName in the HdfDriverEntry structure. serviceName = "sample_service"; // Name of the service provided by the driver. The service name must be unique. deviceMatchAttr = "sample_config"; // Keyword for matching the private data of the driver. The value must be the same as that of match_attr in the private data configuration table of the driver. } } } } } NOTE
NOTE- uid, gid, and caps are startup parameters for user-mode drivers only.
- According to the principle of least privilege for processes, uid and gid do not need to be configured for service modules. In the preceding example, uid and gid are left empty (granted with the common user rights) for sample_host.
- If you need to set uid and gid to system or root due to service requirements, contact security experts for review.
- The process UIDs are configured in base/startup/init_lite/services/etc/passwd, and the process GIDs are configured in base/startup/init_lite/services/etc/group. For details, see Adding a System Service User Group.
- If CAP_DAC_OVERRIDE needs to be configured for a service module, enter caps = ["DAC_OVERRIDE"] instead of caps = ["CAP_DAC_OVERRIDE"].
-
(Optional) Setting driver private information
If the driver has private configuration, add a driver configuration file to set default driver configuration. When loading the driver, the HDF obtains and saves the driver private information in property of HdfDeviceObject, and passes the information to the driver using Bind() and Init() (see step 1).The following is an example of the driver private configuration:
root { SampleDriverConfig { sample_version = 1; sample_bus = "I2C_0"; match_attr = "sample_config"; // The value must be the same as that of deviceMatchAttr in device_info.hcs. } }After the configuration, add the configuration file to the board-level configuration entry file hdf.hcs. (You can use DevEco to perform one-click configuration. For details, see the description about the driver development suite.)
The following is an example:
#include "device_info/device_info.hcs" #include "sample/sample_config.hcs"
-
Drivers can be loaded on demand or in sequence.
On-demand loading
typedef enum { DEVICE_PRELOAD_ENABLE = 0, DEVICE_PRELOAD_ENABLE_STEP2, DEVICE_PRELOAD_DISABLE, DEVICE_PRELOAD_INVALID } DevicePreload;If preload in the configuration file is set to 0 (DEVICE_PRELOAD_ENABLE), the driver is loaded by default during the system boot process.
If preload is set to 1 (DEVICE_PRELOAD_ENABLE_STEP2), the driver is loaded after a quick start is complete. If the system does not support quick start, the value 1 has the same meaning as DEVICE_PRELOAD_ENABLE.
If preload is set to 2 (DEVICE_PRELOAD_DISABLE) , the driver is dynamically loaded instead of being loaded during the system boot process. When a user-mode process requests the driver service, the HDF attempts to dynamically load the driver if the driver service does not exist. For more details, see Driver Messaging Mechanism.
Sequential loading (preload set to 0 (DEVICE_PRELOAD_ENABLE))
In the configuration file, the priority fields (value range: 0 to 200) determines the loading sequence of a host and a driver. For drivers in different hosts, a smaller host priority value indicates a higher driver loading priority; for drivers in the same host, a smaller driver priority value indicates a higher driver loading priority.