Startup
Context Structure
The following figure shows the context structure of the Startup subsystem.
Figure 1 Context structure of the Startup subsystem
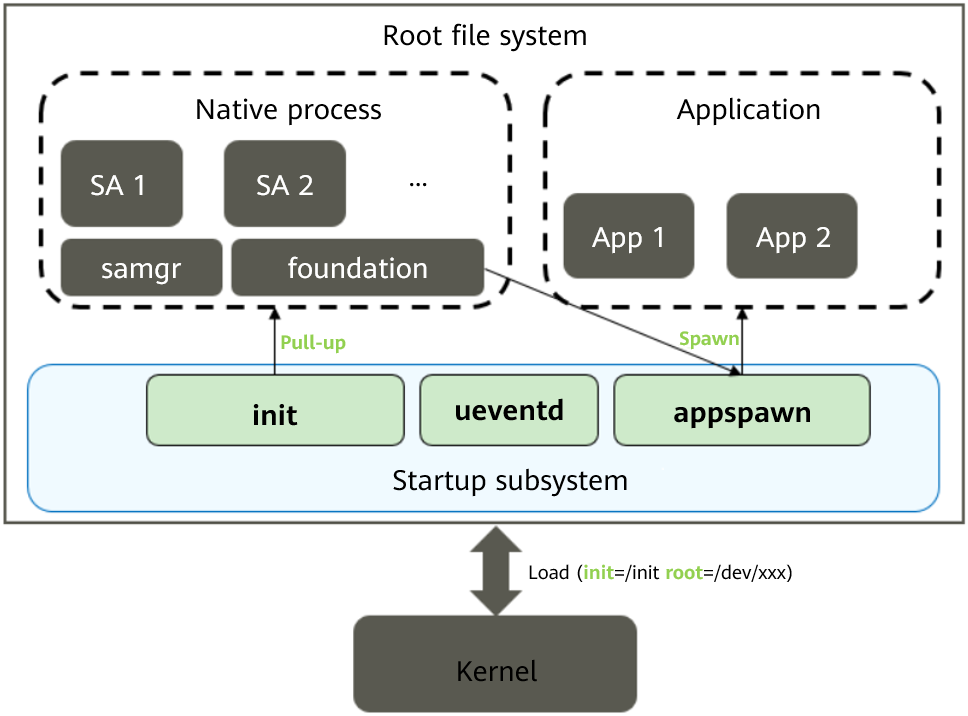
When the system is powered on, the kernel loads and starts services and applications as follows:
- The kernel loads the init process, which is specified by cmdline of the kernel when the bootloader starts the kernel.
- After the init process is started, tmpfs and procfs are mounted and basic dev nodes are created to establish a basic root file system.
- The init process starts the ueventd process to listen for device hot-swap events in the kernel and creates dev nodes for related devices as well as partitions for the block device.
- After mounting partitions (system and vendor) of the block device, the init process scans for the init startup script of each system service and starts the respective system ability (SA).
- Each SA registers with the samgr process, which serves as the service registration center. The samgr process assigns each SA with an ID, which will be used by an application to access the desired SA.
- The foundation process sends the application startup request to the appspawn process. The foundation implements application lifecycle management. It is a special SA service process that provides the user program management framework and basic services.
- The appspawn process directly spawns the application process, eliminating the need for the application to load the JS runtime environment. This reduces the application startup time.
The Startup subsystem consists of the following modules:
-
init module
This module corresponds to the init process, which is the first user-mode process started after the kernel is initialized. After the init process starts, it reads and parses the init.cfg file. Based on the parsing result, the init module executes the commands listed in Table 2 in Job Management and starts the key system service processes in sequence with corresponding permissions granted.
-
ueventd module
This module listens for netlink events about hot swap of kernel device drivers and dynamically manages the dev node of the corresponding device based on the event type.
-
appspawn module
This module spawns application processes upon receiving commands from the foundation, configures permissions for new processes, and calls the entry function of the application framework.
-
bootstrap module
This module provides entry identifiers for starting services and features. When SAMGR is started, the entry function identified by bootstrap is called and system services are started.
-
syspara module
This module provides APIs for obtaining device information, such as the product name, brand name, and manufacturer name, based on the OpenHarmony Product Compatibility Specifications (PCS). It also provides APIs for setting and obtaining system attributes.
Constraints
The source code directory of the Startup subsystem varies according to the platform.
Table 1 Directories and applicable platforms of the Startup subsystem
| Source Code Directory | Applicable Platform |
|---|---|
| base/startup/appspawn_lite | Small-system devices (reference memory ≥ 1 MiB), for example, Hi3516D V300 and Hi3518E V300 |
| base/startup/bootstrap_lite | Mini-system devices (reference memory ≥ 128 KiB), for example, Hi3861 V100 |
| base/startup/init | Small-system devices (reference memory ≥ 1 MiB), for example, Hi3516D V300 and Hi3518E V300 |
| base/startup/syspara_lite | - Mini-system devices (reference memory ≥ 128 KiB), for example, Hi3861 V100 - Small-system devices (reference memory ≥ 1 MiB), for example, Hi3516D V300 and Hi3518E V300 |
-
init module
- To start a system service, you first need to write a boot script file named init.cfg, in which you define the service name, path of executable files, permissions, etc.
- The boot script of each system service is installed in the /system/etc/init directory. The init process scans this directory for the boot script to execute.
-
When porting a new chip platform, you need to add the /vendor/etc/init/init.{hardware}.cfg file that contains the platform-level initialization configuration. This file is used to implement platform-level initialization, for example, installing the ko driver and configuring information on the related /proc nodes.
NOTE
The configuration file init.cfg must be in JSON format.
-
bootstrap module: The zInit code must be configured in the link script.
Boot Process for the OpenHarmony Standard System
By default, the OpenHarmony standard system supports the images listed in the following table.
| Image | Mount Point | Description |
|---|---|---|
| boot.img | NA | Kernel and ramdisk image, which is the first image loaded by the bootloader. |
| system.img | /system | System component image, which stores chip-irrelevant platform services. |
| vendor.img | /vendor | Chip component image, which stores chip-related hardware abstraction services. |
| updater.img | / | Updater image, which is used for system updating. This image is not loaded during normal startup. |
| userdata.img | /data | Writable user data image. |
On each development board, you need to partition the memory to store the preceding images. When the SoC starts, the bootloader loads the images as follows:
- Initializes hardware such as the ROM and RAM, and loads the partition table information.
- Loads the boot.img file based on the partition table and parses and loads the ramdisk.img file to the memory.
- Prepares the partition table information and ramdisk address and enters the kernel, so that the kernel loads the ramdisk image and starts the init process.
- Waits until the init process prepares the initial file system and mounts required.fstab (including system.img and vendor.img) to the file system.
- Scans the boot scripts in the etc/init directory in system.img and vendor.img and runs each boot command.
U-Boot Process
U-Boot is used as an example to describe the key image loading process. When U-Boot starts the system, it passes the boot information to the system by using bootargs.
-
boot.img loading and parsing
-
boot.img format
boot.img building and loading vary depending on the platform. The implementation on mainstream OpenHarmony platforms is as follows:
-
Hi3516D V300
On this platform, the boot.img file uses the flattened image tree (FIT) format. It is generated by the Mkimage tool by packing the zImage-dtb and cpio images, which are generated after kernel compilation, based on the information in the .its file.
The related files and tool are described as follows:
-
.its file
An image source file that describes the information about the image to be generated. You need to create the file, for example, the ohos.its file on the Hi3516 platform.
-
Mkimage packaging tool
A tool that parses its files and packs the corresponding images based on the image configuration to generate an itb file, that is, boot.img.
-
ramdisk
An image file generated by packing cpio images.
-
zImage-dtb
An image file that contains the compressed kernel image and device description file image.
-
-
rk3568
On this platform, the boot.img file is named boot_linux.img. The packaged files are different from those on the Hi3516D V300 platform.
-
Image
Image file generated after kernel compilation.
-
toybrick.dtb
A file that is similar to the device description file image generated after dts compilation.
-
ramdisk.img
An image file generated by packing cpio images.
-
-
-
U-Boot loading
The ramdisk boot process is supported. In this scenario, you need to modify the product configuration file in productdefine and enable ramdisk generation by setting enable_ramdisk. The ramdisk processing method varies according to the platform. Take the Hi3516D V300 platform as an example. You need to change the original U-Boot parameter to root=/dev/ram0 initrd=0x84000000,0x292e00.
-
-
Kernel start
When the U-Boot starts the kernel, it can pass key information to the kernel through bootargs. The information varies according to the platform. The main fields are described in the table below.
| Name | Example | Description |
|---|---|---|
| initrd | 0x84000000,0x292e00 | For details, see the kernel documentation: ramfs-rootfs-initramfs.rst initrd.rst |
| init | /init | |
| blkdevparts | mmcblk0:1M(boot),15M(kernel),200M(system),200M(vendor), 2M(misc),20M(updater),-(userdata) |
Partition table information. The kernel creates physical partitions based on the information. |
| hardware | Hi3516D V300, rk3568, etc. | (Mandatory information) Hardware platform. |
| root | /dev/ram0 (Hi3516D V00) , root=PARTUUID=614e0000-0000 rw (rk3568) | Boot device loaded by the kernel. |
| rootfstype | ext4 | Type of the root file system. |
| default_boot_device | soc/10100000.himci.eMMC | (Recommended information) Default boot device. In the first phase of the boot process, a soft link will be created for the required device based on this field. |
| ohos.required_mount.xxx | /dev/block/platform/soc/10100000.himci.eMMC/by-name/xxx@/usr@ext4@ro,barrier=1@wait,required | The fstab information is first read from cmdline. If this fails, the system will try to read the information from the fstab.required file. |
-
Mounting of required partitions
A required partition is one that is essential for system boot. It must be mounted before level-2 boot. For mandatory images like system and vendor images, the corresponding block device files must be created before mounting. This is usually done based on UEVENT events reported by the kernel. The init process needs to know the main device directory of the storage device. The bootloader passes the primary device directory of the storage device to the init process through default_boot_device.
Currently, the init process obtains required partition information in two ways. The init process first reads the required partition information through the bootargs in /proc/cmdline. If the attempt fails, the init process reads the fstab.required file in the ramdisk image.
-
Logic of block device creation
- Preparation
- The init process reads the required fstab information from cmdline. If the attempt fails, the init process reads the fstab.required file to obtain PARTNAME of the block devices that must be mounted, for example, system or vendor.
- Create a socket for receiving uevent messages reported by the kernel and read default_boot_device from /proc/cmdline.
- Traverse the /sys/devices directory with the fstab information and socket handle to get the kernel prepared for reporting uevent messages.
- Event triggering
- Use ueventd to trigger the kernel to report a uevent message.
- Check whether partitionName in the uevent message matches with device information in the required fstab.
- If they match, format the device node path and proceed with device node creation.
- Device node creation
- Format the path of the soft link to be created for required block device nodes. A soft link helps facilitate access to device nodes in user mode and improve their readability.
- Create device nodes based on the primary and secondary device numbers passed in the uevent message, and the device node path and soft link path obtained in the previous steps. Meanwhile, create a soft link for them.
Up to now, the creation of block device nodes is complete.
-
Mapping with default_boot_device
The kernel writes bootargs information to /proc/cmdline. The information includes default_boot_device, which specifies the primary device directory required for system boot. The content prefixed with ohos.required_mount. is the partition mounting information required for system boot. It should be the same as that in the fstab.required file. In addition, the block device node in the partition mounting information should be a device node pointed by the soft link under by-name in the default_boot_device directory. For example, if the value of default_boot_device is soc/10100000.himci.eMMC, then the value of ohos.required_mount.system contains /dev/block/platform/soc/10100000.himci.eMMC/by-name/system, which is the soft link pointing to the system device node.
During creation of a block device node, the device path will be matched against the value of default_boot_device. If the matching is successful, a soft link pointing to the real block device node will be created in /dev/block/by-name. In this way, device node access is made irrelevant to the chip platform.
-
Example
This example assumes the system partition as the required partition on the Hi3516D V300 platform to illustrate the boot process. During this process, the init process reads the required fstab information, creates a block device node, and mounts it to the required partition. The following provides the key code snippets and log information as reference for debugging.
NOTE
The code snippets below are exhibited in the logical sequence. They are not neighboring to each other in the source code.
-
Obtain required device information.
Fstab* LoadRequiredFstab(void) { Fstab *fstab = NULL; fstab = LoadFstabFromCommandLine(); if (fstab == NULL) { INIT_LOGI("Cannot load fstab from command line, try read from fstab.required"); const char *fstabFile = "/etc/fstab.required"; if (access(fstabFile, F_OK) != 0) { fstabFile = "/system/etc/fstab.required"; } INIT_ERROR_CHECK(access(fstabFile, F_OK) == 0, abort(), "Failed to get fstab.required"); fstab = ReadFstabFromFile(fstabFile, false); } return fstab; }The preceding code provides two methods for the init process to obtain the fstab information. First, the init process calls LoadFstabFromCommandLine() to read the fstab information from cmdline. If the attempt fails, the init process reads the fstab.required file to obtain the fstab information.
For the system partition, the key information read from devices is as follows:
/dev/block/platform/fe310000.sdhci/by-name/system -
Create a socket and trigger the kernel to report a uevent message.
static int StartUeventd(char **requiredDevices, int num) { INIT_ERROR_CHECK(requiredDevices != NULL && num > 0, return -1, "Failed parameters"); int ueventSockFd = UeventdSocketInit(); if (ueventSockFd < 0) { INIT_LOGE("Failed to create uevent socket"); return -1; } RetriggerUevent(ueventSockFd, requiredDevices, num); close(ueventSockFd); return 0; } -
Read information from cmdline to obtain default_boot_device.
char *buffer = ReadFileData("/proc/cmdline"); int ret = GetProcCmdlineValue("default_boot_device", buffer, bootDevice, CMDLINE_VALUE_LEN_MAX); INIT_CHECK_ONLY_ELOG(ret == 0, "Failed to get default_boot_device value from cmdline");In this example, the value of default_boot_device is soc/10100000.himci.eMMC. The value is stored in the global variable bootDevice and will be matched with the path of the system partition device when a soft link is created.
-
Process the uevent message of the required partition device.
if (uevent->partitionName == NULL) { INIT_LOGI("Match with %s for %s", devices[i], uevent->syspath); deviceName = strstr(devices[i], "/dev/block"); INIT_INFO_CHECK(deviceName != NULL, continue, "device %s not match \"/dev/block\".", devices[i]); deviceName += sizeof("/dev/block") - 1; INIT_INFO_CHECK(strstr(uevent->syspath, deviceName) != NULL, continue, "uevent->syspath %s not match deviceName %s", uevent->syspath, deviceName); HandleBlockDeviceEvent(uevent); break; } else if (strstr(devices[i], uevent->partitionName) != NULL) { INIT_LOGI("Handle block device partitionName %s", uevent->partitionName); HandleBlockDeviceEvent(uevent); break; }In this step, the device information in devices is matched with the uevent message reported by the kernel. The value of uevent->partitionName should be system for the uevent message of the system partition device. If the value matches the /dev/block/platform/fe310000.sdhci/by-name/system field in devices, the uevent message of the system partition device will be processed.
-
Create the required device node and the corresponding soft link.
The first thing is to format the path of the corresponding soft link. In this step, the value of default_boot_device in bootargs will be matched with the path of the required device node in the uevent message, so as to create a platform-irrelevant soft link that points to the device node. The key code is as follows:
if (STRINGEQUAL(bus, "/sys/bus/platform")) { INIT_LOGV("Find a platform device: %s", parent); parent = FindPlatformDeviceName(parent); if (parent != NULL) { BuildDeviceSymbolLinks(links, linkNum, parent, uevent->partitionName, uevent->deviceName); } linkNum++; if ((parent != NULL) && STRINGEQUAL(parent, bootDevice)) { BuildBootDeviceSymbolLink(links, linkNum, uevent->partitionName); linkNum++; } }The key variables in the code are as follows:
- bus: a string that saves the path of the bus connected to the current device.
- parent: a string that stores the device path obtained from syspath in the uevent message.
- links: a pointer to the memory that stores the soft link path.
- bootDevice: a string that stores the value of default_boot_device in bootargs
According to the code, the corresponding soft link is created for the device only when the type of the connected bus is platform. The path of the soft link is as follows:
/dev/block/platform/soc/10100000.himci.eMMC/by-nameA platform-irrelevant soft link is created only when the device path matches that in bootDevice.
For the system partition device, the path is as follows:
/sys/devices/platform/soc/10100000.himci.eMMC/mmc_host/mmc0/mmc0:0001/block/mmcblk0/mmcblk0p5Therefore, when processing the uevent message of the device, the init process compares the device path with that in bootDevice, that is, soc/10100000.himci.eMMC. If they match, a soft link will be created as follows:
/dev/block/by-name/systemAfter the soft link path is formatted, the init process creates the device node and soft link based on the information in the uevent message. Up to now, the creation of a device node for the system partition is complete.
-
Mount the required partition.
After a device node is created, mount it to the corresponding partition. The code is as follows:
int MountRequiredPartitions(const Fstab *fstab) { INIT_ERROR_CHECK(fstab != NULL, return -1, "Failed fstab is NULL"); int rc; INIT_LOGI("Mount required partitions"); rc = MountAllWithFstab(fstab, 1); return rc; }Therefore, when "Mount required partitions" is displayed, the required partition device is ready for mounting. During the mounting process, the following key information is printed:
BEGET_LOGE("Unsupported file system \" %s \"", item->fsType); // The current file system type is not supported. BEGET_LOGE("Cannot get stat of \" %s \", err = %d", target, errno); // Failed to obtain the mount point directory. BEGET_LOGE("Failed to create dir \" %s \", err = %d", target, errno); // Failed to create the mount point directory. BEGET_LOGI("Mount %s to %s successful", item->deviceName, item->mountPoint); // The device is successfully mounted. The output also contains the name of the mounted device and information about the mount point.
-
-
-
Mounting of vendor partitions
After mounting required partitions, the init process scans each script file in the vendor partition. The initialization scripts related to the chip or development board are named in the format of /vendor/etc/init.{ohos.boot.hardware}.cfg. Wherein, /vendor/etc/fstab.{ohos.boot.hardware} represents the extended mount partition file; hardware is sourced from bootargs, which is passed from the bootloader to the kernel.
Boot Loading Without ramdisk
Certain development boards do not use the ramdisk boot mode. For these boards, the boot process is implemented by directly loading the system.img file through the kernel. In such case, you need to modify the product configuration file in productdefine. Specifically, you need to turn off the enable_ramdisk switch to disable ramdisk generation so that the init process does not boot from ramdisk to system.
Boot loading in this scenario is similar to that in the preceding section. The only difference is as follows: If ramdisk is used, the init process mounts system.img to the /usr directory and then switches to the /usr directory using chroot. If ramdisk is not used, the init process directly runs the init.cfg file.
For boot loading without ramdisk (that is, system as root), the block device where the root file system is located is passed to the kernel through bootargs, for example, root=/dev/mmcblk0p5 and rootfstype=ext4. During initialization of the root file system, the kernel parses the root field in bootargs to complete mounting of the root file system.
Partition A/B Booting
Currently, OpenHarmony supports booting from partitions A and B (active and standby system partitions), both of which are configured in the same device storage. During the booting process, the system partition to load is determined based on the slot of the active partition. Partition A/B booting is supported only for the system partition and chipset partition.
-
bootslots
Number of the supported boot partitions. If bootslots is set to 2, the system can boot from both system partitions A and B. If bootslots is set to 1, partition A/B booting is not supported and the system can boot only from the default system partition.
In the initial phase of init process startup, the system reads the bootslots value to determine whether partition A/B booting is supported. If yes, the system continues to determine the system partition to mount. If not, the system mounts the system partition based on the default fstab. The API for the init process to obtain the bootslots value is as follows:
int GetBootSlots(void) { int bootSlots = GetSlotInfoFromParameter("bootslots"); BEGET_CHECK_RETURN_VALUE(bootSlots <= 0, bootSlots); BEGET_LOGI("No valid slot value found from parameter, try to get it from cmdline"); return GetSlotInfoFromCmdLine("bootslots"); }After normal system startup, you can obtain the bootslots value from the system parameter ohos.boot.bootslots to check whether the current system supports partition A/B booting. The command for obtaining ohos.boot.bootslots is as follows:
param get ohos.boot.bootslots -
currentslot
Current system partition, for example, partition A or partition B. The value of currentslot is a number. For example, 1 indicates partition A, and 2 indicates partition B.
In the initial phase of startup, the init process determines whether the system supports partition A/B booting based on bootslots. If the system does not support partition A/B booting, the init process directly boots from the default system partition instead of obtaining the currentslot value. If the system supports partition A/B booting, the init process obtains the currentslot value and determines whether partition A or partition B is the current system partition. The API for the init process to obtain the currentslot value is as follows:
int GetCurrentSlot(void) { // get current slot from parameter int currentSlot = GetSlotInfoFromParameter("currentslot"); BEGET_CHECK_RETURN_VALUE(currentSlot <= 0, currentSlot); BEGET_LOGI("No valid slot value found from parameter, try to get it from cmdline"); // get current slot from cmdline currentSlot = GetSlotInfoFromCmdLine("currentslot"); BEGET_CHECK_RETURN_VALUE(currentSlot <= 0, currentSlot); BEGET_LOGI("No valid slot value found from cmdline, try to get it from misc"); // get current slot from misc return GetSlotInfoFromMisc(MISC_PARTITION_ACTIVE_SLOT_OFFSET, MISC_PARTITION_ACTIVE_SLOT_SIZE); } -
Partition A/B booting process
- Obtain the currentslot value to determine whether partition A or partition B is the current system partition.
- Construct new partition mounting configuration based on the original fstab file, and add the suffix a or b to the partitions that support partition A/B booting, that is, system and chipset partitions.
- Mount the partition added with the corresponding suffix and enter the second phase of startup. This phase occurs in partition A or B and concludes the partition A/B booting process.
The API for constructing new partition mounting configuration is as follows:
static void AdjustPartitionNameByPartitionSlot(FstabItem *item) { BEGET_CHECK_ONLY_RETURN(strstr(item->deviceName, "/system") != NULL || strstr(item->deviceName, "/chipset") != NULL); char buffer[MAX_BUFFER_LEN] = {0}; int slot = GetCurrentSlot(); BEGET_ERROR_CHECK(slot > 0 && slot <= MAX_SLOT, slot = 1, "slot value %d is invalid, set default value", slot); BEGET_INFO_CHECK(slot > 1, return, "default partition doesn't need to add suffix"); BEGET_ERROR_CHECK(sprintf_s(buffer, sizeof(buffer), "%s_%c", item->deviceName, 'a' + slot - 1) > 0, return, "Failed to format partition name suffix, use default partition name"); free(item->deviceName); item->deviceName = strdup(buffer); BEGET_LOGI("partition name with slot suffix: %s", item->deviceName); } -
Development example
The following uses the rk3568 platform as an example to illustrate how to change from default partition booting to partition A/B booting.
-
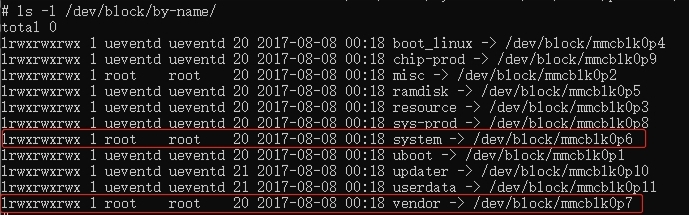
Burn the original image, and view the device information of each partition.
Use the original image to construct images of the partitions used for partition A/B booting, and test the partition A/B booting function.
- Copy the system and vendor images, and add the suffix _b to them.
- Add partitions system_b and vendor_b to the partition table in parameter.txt.
-
Burn the images of the partitions used for partition A/B booting.
- Import the partition configuration to the rk3568 burning tool, and select the parameter.txt file containing the system_b and vendor_b partitions.
- Select images (including system_b and vendor_b images) based on the new partition table configuration, and then burn the images.
-
After the configuration is complete, perform the following:
-
Run the cat /proc/cmdline command. If the command output contains bootslot=2, the system supports partition A/B booting.

-
Run the param get ohos.boot.bootslot command. If the command output contains 2, the bootslot information is successfully written to the parameter.txt.
-
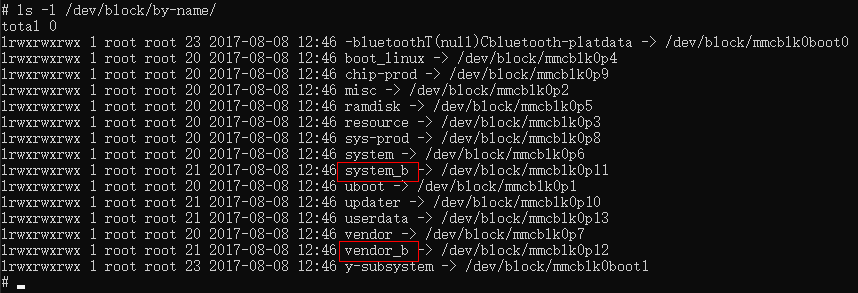
Run the ls -l /dev/block/by-name command. If the command output contains system_b and vendor_b, device nodes are successfully created in partition B.
-
Run the df -h command to check the partitions mounted to the system.
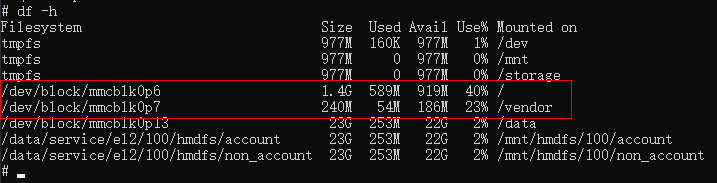
As shown in the figure, partition mmcblk0p6 is mounted to the root file system (represented by a slash), and partition mmcblk0p7 is mounted to /vendor. Based on the command output in step 3, mmcblk0p6 is the system partition, and mmcblk0p7 is the vendor partition. That is, the mounted partitions are the default partitions, that is, system and vendor partitions without suffixes. In other words, partition A is the default partition.
Next, let's try booting from partition B.
- Run the partitionslot setactive 2 command to set the slot of the active partition to 2, that is, the slot of partition B.
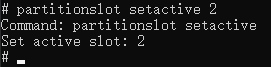
- Run the partitionslot getslot command to check the configured slot.
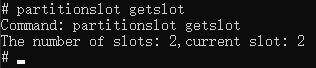
If current slot is 2, the slot of the active partition is successfully set to 2.
- Upon restarting, run the df -h command to check the partitions mounted to the system. According to the command output, partition mmcblk0p11 is mounted to the root file system, and partition mmcblk0p12 is mounted to /vendor.
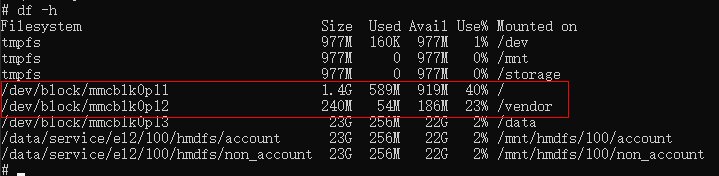
- Run the ls -l /dev/block/by-name command again.
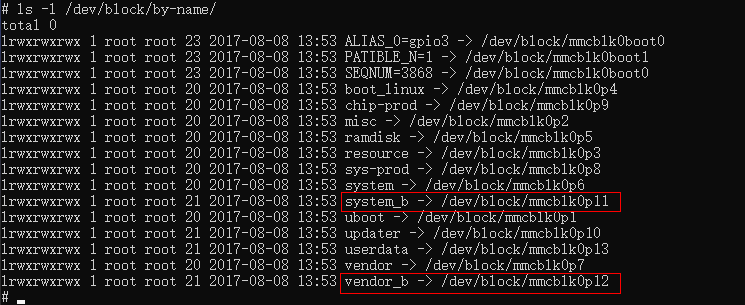
mmcblk0p11 corresponds to system_b, and mmcblk0p12 corresponds to vendor_b. That is, the system is successfully booted from partition B.
-
-