MMC
概述
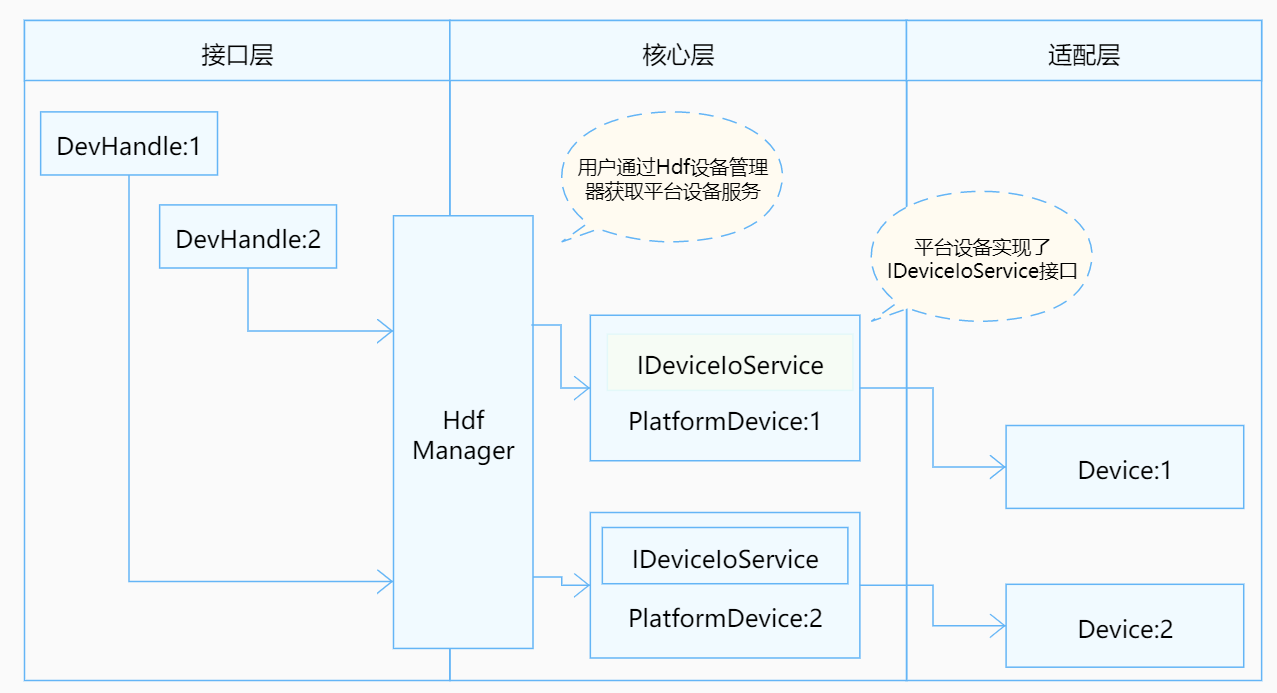
MMC(MultiMedia Card),即多媒体卡,在HDF框架中,MMC的接口适配模式采用独立服务模式,在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。
独立服务模式可以直接借助HDFDeviceManager的服务管理能力,但需要为每个设备单独配置设备节点,增加内存占用。
图 1 独立服务模式结构图
开发步骤
MMC模块适配的三个环节是配置属性文件,实例化驱动入口,以及实例化核心层接口函数。
-
实例化驱动入口:
- 实例化HdfDriverEntry结构体成员。
- 调用HDF_INIT将HdfDriverEntry实例化对象注册到HDF框架中。
-
配置属性文件:
- 在device_info.hcs文件中添加deviceNode描述。
- 【可选】添加mmc_config.hcs器件属性文件。
-
实例化MMC控制器对象:
- 初始化MmcCntlr成员。
- 实例化MmcCntlr成员MmcCntlrOps,其定义和成员说明见下
-
驱动调试:
- 【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的信息反馈,设备启动是否成功等。
说明:
MmcCntlrOps定义
struct MmcCntlrOps { int32_t (*request)(struct MmcCntlr *cntlr, struct MmcCmd *cmd); int32_t (*setClock)(struct MmcCntlr *cntlr, uint32_t clock); int32_t (*setPowerMode)(struct MmcCntlr *cntlr, enum MmcPowerMode mode); int32_t (*setBusWidth)(struct MmcCntlr *cntlr, enum MmcBusWidth width); int32_t (*setBusTiming)(struct MmcCntlr *cntlr, enum MmcBusTiming timing); int32_t (*setSdioIrq)(struct MmcCntlr *cntlr, bool enable); int32_t (*hardwareReset)(struct MmcCntlr *cntlr); int32_t (*systemInit)(struct MmcCntlr *cntlr); int32_t (*setEnhanceSrobe)(struct MmcCntlr *cntlr, bool enable); int32_t (*switchVoltage)(struct MmcCntlr *cntlr, enum MmcVolt volt); bool (*devReadOnly)(struct MmcCntlr *cntlr); bool (*devPluged)(struct MmcCntlr *cntlr); bool (*devBusy)(struct MmcCntlr *cntlr); int32_t (*tune)(struct MmcCntlr *cntlr, uint32_t cmdCode); int32_t (*rescanSdioDev)(struct MmcCntlr *cntlr); };表1 MmcCntlrOps结构体成员的回调函数功能说明
成员函数 入参 返回值 功能 doRequest cntlr: 核心层结构体指针,mmc控制器 ;
cmd: 结构体指针,传入命令值HDF_STATUS相关状态 request相应处理 setClock cntlr: 核心层结构体指针,mmc控制器 ;
clock: 时钟传入值HDF_STATUS相关状态 设置时钟频率 setPowerMode cntlr: 核心层结构体指针,mmc控制器 ;
mode: 枚举值(见MmcPowerMode定义),功耗模式HDF_STATUS相关状态 设置功耗模式 setBusWidth cntlr: 核心层结构体指针,mmc控制器 ;
width: 枚举值(见MmcBusWidth定义),总线带宽HDF_STATUS相关状态 设置总线带宽 setBusTiming cntlr: 核心层结构体指针,mmc控制器 ;
timing: 枚举值(见MmcBusTiming定义),总线时序HDF_STATUS相关状态 设置总线时序 setSdioIrq cntlr: 核心层结构体指针,mmc控制器 ;
enable: 布尔值,控制中断HDF_STATUS相关状态 使能/去使能SDIO中断 hardwareReset cntlr: 核心层结构体指针,mmc控制器 ; HDF_STATUS相关状态 复位硬件 systemInit cntlr: 核心层结构体指针,mmc控制器 ; HDF_STATUS相关状态 系统初始化 setEnhanceSrobe cntlr: 核心层结构体指针,mmc控制器 ;
enable: 布尔值,设置功能HDF_STATUS相关状态 设置增强选通 switchVoltage cntlr: 核心层结构体指针,mmc控制器 ;
volt: 枚举值,电压值(3.3,1.8,1.2V);HDF_STATUS相关状态 设置电压值 devReadOnly cntlr: 核心层结构体指针,mmc控制器 ; 布尔值 检验设备是否只读 cardPluged cntlr: 核心层结构体指针,mmc控制器 ; 布尔值 检验设备是否拔出 devBusy cntlr: 核心层结构体指针,mmc控制器 ; 布尔值 检验设备是否忙碌 tune cntlr: 核心层结构体指针,mmc控制器 ;
cmdCode: uint32_t,命令代码;HDF_STATUS相关状态 调谐 rescanSdioDev cntlr: 核心层结构体指针,mmc控制器 ; HDF_STATUS相关状态 扫描并添加SDIO设备,
开发实例
下方将以himci.c为示例,展示需要厂商提供哪些内容来完整实现设备功能。
-
驱动开发首先需要实例化驱动入口,驱动入口必须为HdfDriverEntry(在 hdf_device_desc.h 中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。
一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
-
MMC驱动入口参考
struct HdfDriverEntry g_mmcDriverEntry = { .moduleVersion = 1, .Bind = HimciMmcBind, //见Bind参考 .Init = HimciMmcInit, //见Init参考 .Release = HimciMmcRelease, //见Release参考 .moduleName = "hi3516_mmc_driver",//【必要且与HCS文件中里面的moduleName匹配】 }; HDF_INIT(g_mmcDriverEntry); //调用HDF_INIT将驱动入口注册到HDF框架中
-
完成驱动入口注册之后,下一步请在device_info.hcs文件中添加deviceNode信息,并在mmc_config.hcs中配置器件属性。deviceNode信息与驱动入口注册相关,器件属性值与核心层MmcCntlr成员的默认值或限制范围有密切关系。
如有多个器件信息,则需要在device_info文件增加deviceNode信息,以及在mmc_config文件中增加对应的器件属性。。
-
device_info.hcs 配置参考
root { device_info { match_attr = "hdf_manager"; platform :: host { hostName = "platform_host"; priority = 50; device_mmc:: device { device0 :: deviceNode { policy = 2; priority = 10; permission = 0644; moduleName = "hi3516_mmc_driver"; //【必要】用于指定驱动名称,需要与驱动Entry中的moduleName一致; serviceName = "HDF_PLATFORM_MMC_0"; //【必要】驱动对外发布服务的名称,必须唯一 deviceMatchAttr = "hi3516_mmc_emmc";//【必要】用于配置控制器私有数据,要与 mmc_config.hcs 中对应控制器保持一致 } device1 :: deviceNode { policy = 1; priority = 20; permission = 0644; moduleName = "hi3516_mmc_driver"; serviceName = "HDF_PLATFORM_MMC_1"; deviceMatchAttr = "hi3516_mmc_sd"; //SD类型 } device2 :: deviceNode { policy = 1; priority = 30; permission = 0644; moduleName = "hi3516_mmc_driver"; serviceName = "HDF_PLATFORM_MMC_2"; deviceMatchAttr = "hi3516_mmc_sdio";//SDIO类型 } } } } } -
mmc_config.hcs 配置参考
root { platform { mmc_config { template mmc_controller {//模板公共参数,继承该模板的节点如果使用模板中的默认值,则节点字段可以缺省 match_attr = ""; voltDef = 0; // 3.3V freqMin = 50000; //【必要】最小频率值 freqMax = 100000000; //【必要】最大频率值 freqDef = 400000; //【必要】默认频率值 maxBlkNum = 2048; //【必要】最大的block号 maxBlkSize = 512; //【必要】最大的block个数 ocrDef = 0x300000; //【必要】工作电压设置相关 caps2 = 0; //【必要】属性寄存器相关,见mmc_caps.h 中 MmcCaps2 定义 regSize = 0x118; //【必要】寄存器位宽 hostId = 0; //【必要】主机号 regBasePhy = 0x10020000;//【必要】寄存器物理基地址 irqNum = 63; //【必要】中断号 devType = 2; //【必要】模式选择:emmc, SD, SDIO ,COMBO caps = 0x0001e045; //【必要】属性寄存器相关,见mmc_caps.h 中 MmcCaps 定义 } controller_0x10100000 :: mmc_controller { match_attr = "hi3516_mmc_emmc";//【必要】需要和device_info.hcs中的deviceMatchAttr值一致 hostId = 0; regBasePhy = 0x10100000; irqNum = 96; devType = 0; // emmc类型 caps = 0xd001e045; caps2 = 0x60; } controller_0x100f0000 :: mmc_controller { match_attr = "hi3516_mmc_sd"; hostId = 1; regBasePhy = 0x100f0000; irqNum = 62; devType = 1; // sd类型 caps = 0xd001e005; } controller_0x10020000 :: mmc_controller { match_attr = "hi3516_mmc_sdio"; hostId = 2; regBasePhy = 0x10020000; irqNum = 63; devType = 2; // sdio类型 caps = 0x0001e04d; } } } }
- 完成驱动入口注册之后,最后一步就是以核心层MmcCntlr对象的初始化为核心,包括厂商自定义结构体(传递参数和数据),实例化MmcCntlr成员MmcCntlrOps(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind,Init,Release)
-
自定义结构体参考
从驱动的角度看,自定义结构体是参数和数据的载体,而且mmc_config.hcs文件中的数值会被HDF读入通过DeviceResourceIface来初始化结构体成员 ,一些重要数值也会传递给核心层对象。
struct HimciHost { struct MmcCntlr *mmc;//【必要】核心层结构体 struct MmcCmd *cmd; //【必要】核心层结构体,传递命令的,相关命令见枚举量 MmcCmdCode //【可选】根据厂商驱动需要添加 void *base; enum HimciPowerStatus powerStatus; uint8_t *alignedBuff; uint32_t buffLen; struct scatterlist dmaSg; struct scatterlist *sg; uint32_t dmaSgNum; DMA_ADDR_T dmaPaddr; uint32_t *dmaVaddr; uint32_t irqNum; bool isTuning; uint32_t id; struct OsalMutex mutex; bool waitForEvent; HIMCI_EVENT himciEvent; }; //MmcCntlr是核心层控制器结构体,其中的成员在bind函数中会被赋值 struct MmcCntlr { struct IDeviceIoService service; struct HdfDeviceObject *hdfDevObj; struct PlatformDevice device; struct OsalMutex mutex; struct OsalSem released; uint32_t devType; struct MmcDevice *curDev; struct MmcCntlrOps *ops; struct PlatformQueue *msgQueue; uint16_t index; uint16_t voltDef; uint32_t vddBit; uint32_t freqMin; uint32_t freqMax; uint32_t freqDef; union MmcOcr ocrDef; union MmcCaps caps; union MmcCaps2 caps2; uint32_t maxBlkNum; uint32_t maxBlkSize; uint32_t maxReqSize; bool devPluged; bool detecting; void *priv; }; -
【重要】 MmcCntlr成员回调函数结构体MmcCntlrOps的实例化,其他成员在Bind函数中初始化
static struct MmcCntlrOps g_himciHostOps = { .request = HimciDoRequest, .setClock = HimciSetClock, .setPowerMode = HimciSetPowerMode, .setBusWidth = HimciSetBusWidth, .setBusTiming = HimciSetBusTiming, .setSdioIrq = HimciSetSdioIrq, .hardwareReset = HimciHardwareReset, .systemInit = HimciSystemInit, .setEnhanceSrobe= HimciSetEnhanceSrobe, .switchVoltage = HimciSwitchVoltage, .devReadOnly = HimciDevReadOnly, .devPluged = HimciCardPluged, .devBusy = HimciDevBusy, .tune = HimciTune, .rescanSdioDev = HimciRescanSdioDev, }; -
Bind函数参考
入参: HdfDeviceObject 是整个驱动对外暴露的接口参数,具备 HCS 配置文件的信息
返回值: HDF_STATUS相关状态 (下表为部分展示,如需使用其他状态,可见//drivers/framework/include/utils/hdf_base.h中HDF_STATUS 定义)
状态(值) 问题描述 HDF_ERR_INVALID_OBJECT 控制器对象非法 HDF_ERR_MALLOC_FAIL 内存分配失败 HDF_ERR_INVALID_PARAM 参数非法 HDF_ERR_IO I/O 错误 HDF_SUCCESS 初始化成功 HDF_FAILURE 初始化失败 函数说明: MmcCntlr,HimciHost,HdfDeviceObject之间互相赋值,方便其他函数可以相互转化,初始化自定义结构体HimciHost对象,初始化MmcCntlr成员,调用核心层MmcCntlrAdd函数。
static int32_t HimciMmcBind(struct HdfDeviceObject *obj) { struct MmcCntlr *cntlr = NULL; struct HimciHost *host = NULL; int32_t ret; cntlr = (struct MmcCntlr *)OsalMemCalloc(sizeof(struct MmcCntlr)); host = (struct HimciHost *)OsalMemCalloc(sizeof(struct HimciHost)); host->mmc = cntlr; //【必要】使HimciHost与MmcCntlr可以相互转化的前提 cntlr->priv = (void *)host; //【必要】使HimciHost与MmcCntlr可以相互转化的前提 cntlr->ops = &g_himciHostOps; //【必要】MmcCntlrOps的实例化对象的挂载 cntlr->hdfDevObj = obj; //【必要】使HdfDeviceObject与MmcCntlr可以相互转化的前提 obj->service = &cntlr->service; //【必要】使HdfDeviceObject与MmcCntlr可以相互转化的前提 ret = MmcCntlrParse(cntlr, obj); //【必要】 初始化 cntlr. 失败就 goto _ERR; ... ret = HimciHostParse(host, obj); //【必要】 初始化 host对象的相关属性,失败就 goto _ERR; ... ret = HimciHostInit(host, cntlr);//厂商自定义的初始化,失败就 goto _ERR; ... ret = MmcCntlrAdd(cntlr); //调用核心层函数 失败就 goto _ERR; ... (void)MmcCntlrAddDetectMsgToQueue(cntlr);//将卡检测消息添加到队列中。 HDF_LOGD("HimciMmcBind: success."); return HDF_SUCCESS; _ERR: HimciDeleteHost(host); HDF_LOGD("HimciMmcBind: fail, err = %d.", ret); return ret; } -
Init函数参考
入参: HdfDeviceObject是整个驱动对外暴露的接口参数,具备HCS配置文件的信息
返回值: HDF_STATUS相关状态
函数说明: 实现ProcMciInit
static int32_t HimciMmcInit(struct HdfDeviceObject *obj) { static bool procInit = false; (void)obj; if (procInit == false) { if (ProcMciInit() == HDF_SUCCESS) { procInit = true; HDF_LOGD("HimciMmcInit: proc init success."); } } HDF_LOGD("HimciMmcInit: success."); return HDF_SUCCESS; } -
Release函数参考
入参: HdfDeviceObject 是整个驱动对外暴露的接口参数,具备 HCS 配置文件的信息
返回值: 无
函数说明: 释放内存和删除控制器等操作,该函数需要在驱动入口结构体中赋值给Release接口,当HDF框架调用Init函数初始化驱动失败时,可以调用 Release释放驱动资源。所有强制转换获取相应对象的操作前提是在Init函数中具备对应赋值的操作。
static void HimciMmcRelease(struct HdfDeviceObject *obj) { struct MmcCntlr *cntlr = NULL; ... cntlr = (struct MmcCntlr *)obj->service;//这里有HdfDeviceObject到MmcCntlr的强制转化,通过service成员,赋值见Bind函数 ... HimciDeleteHost((struct HimciHost *)cntlr->priv);//厂商自定义的内存释放函数,这里有MmcCntlr到HimciHost的强制转化 }