Camera
概述
功能简介
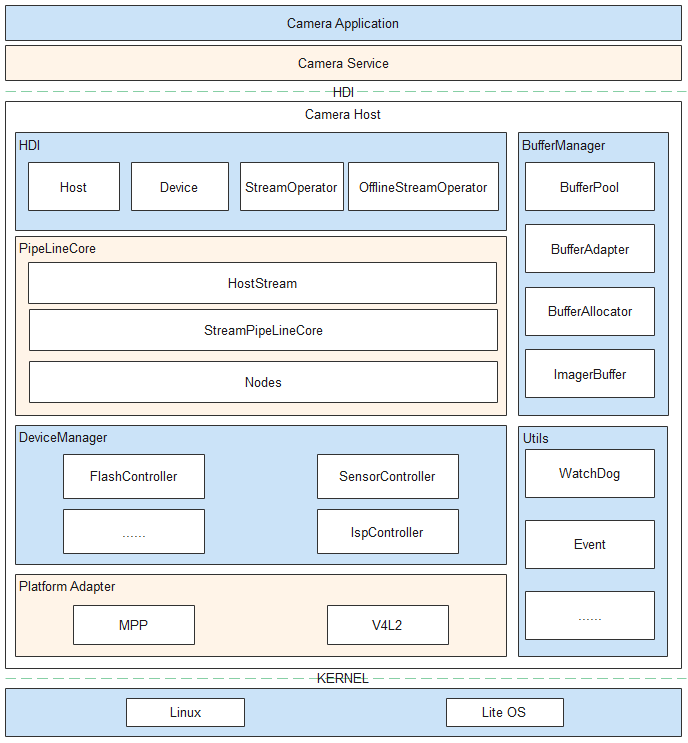
OpenHarmony相机驱动框架模型对上实现相机HDI(Hardware Device Interface)接口,对下实现相机Pipeline模型,管理相机各个硬件设备。 该驱动框架模型内部分为三层,依次为HDI实现层、框架层和设备适配层。各层基本概念如下:
- HDI实现层:实现OHOS(OpenHarmony Operation System)相机标准南向接口。
- 框架层:对接HDI实现层的控制、流的转发,实现数据通路的搭建,管理相机各个硬件设备等功能。
- 设备适配层:屏蔽底层芯片和OS(Operation System)差异,支持多平台适配。
运作机制
Camera模块主要包含服务、设备的初始化,数据通路的搭建,流的配置、创建、下发、捕获等,具体运作机制参考以下图文解析:
图 1 基于HDF驱动框架的Camera驱动模型
-
系统启动时创建camera_host进程。进程创建后,首先枚举底层设备,创建(也可以通过配置表创建)管理设备树的DeviceManager类及其内部各个底层设备的对象,创建对应的CameraHost类实例并且将其注册到UHDF(用户态HDF驱动框架)服务中,方便相机服务层通过UHDF服务获取底层CameraDeviceHost的服务,从而操作硬件设备。
-
Service通过CameraDeviceHost服务获取CameraHost实例,CameraHost可以获取底层的Camera能力,开启闪光灯、调用Open接口打开Camera创建连接、创建DeviceManager(负责底层硬件模块上电)、创建CameraDevice(向上提供设备控制接口)。创建CameraDevice时会实例化PipelineCore的各个子模块,其中StreamPipelineCore负责创建Pipeline,MetaQueueManager负责上报metaData。
-
Service通过CameraDevice模块配置流、创建Stream类。StreamPipelineStrategy模块通过上层下发的模式和查询配置表创建对应流的Node连接方式,StreamPipelineBuilder模块创建Node实例并且连接返回该Pipeline给StreamPipelineDispatcher。StreamPipelineDispatcher提供统一的Pipeline调用管理。
-
Service通过Stream控制整个流的操作,AttachBufferQueue接口将从显示模块申请的BufferQueue下发到底层,由CameraDeviceDriverModel自行管理buffer,当Capture接口下发命令后,底层开始向上传递buffer。Pipeline的IspNode依次从BufferQueue获取指定数量buffer,然后下发到底层ISP(Image Signal Processor,图像信号处理器)硬件,ISP填充完之后将buffer传递给CameraDeviceDriverModel,CameraDeviceDriverModel通过循环线程将buffer填充到已经创建好的Pipeline中,各个Node处理后通过回调传递给上层,同时buffer返回BufferQueue等待下一次下发。
-
Service通过Capture接口下发拍照命令。ChangeToOfflineStream接口查询拍照buffer位置,如果ISP已经出图,并且图像数据已经送到IPP node,可以将普通拍照流转换为离线流,否则直接走关闭流程。ChangeToOfflineStream接口通过传递StreamInfo使离线流获取到普通流的流信息,并且通过配置表确认离线流的具体Node连接方式,创建离线流的Node连接(如果已创建则通过CloseCamera释放非离线流所需的Node),等待buffer从底层Pipeline回传到上层再释放持有的Pipeline相关资源。
-
Service通过CameraDevice的UpdateSettings接口向下发送CaptureSetting参数,CameraDeviceDriverModel通过StreamPipelineDispatcher模块向各个Node转发,StartStreamingCapture和Capture接口携带的CaptureSetting通过StreamPipelineDispatcher模块向该流所属的Node转发。
-
Service通过EnableResult和DisableResult接口控制底层metaData的上报。如果需要底层metaData上报,pipeline会创建CameraDeviceDriverModel内部的一个Bufferqueue用来收集和传递metaData,根据StreamPipelineStrategy模块查询配置表并通过StreamPipelineBuilder创建和连接Node,MetaQueueManager下发buffer至底层,底层相关Node填充数据,MetaQueueManager模块再调用上层回调传递给上层。
-
Service调用CameraDevice的Close接口,CameraDevice调用对应的DeviceManager模块对各个硬件下电;如果此时在Ipp的SubPipeline中存在OfflineStream,则需要保留OfflineStream,直到执行完毕。
-
动态帧率控制。在StreamOperator中起一个CollectBuffer线程,CollectBuffer线程从每一路stream的BufferQueue中获取buffer,如果某一路流的帧率需要控制(为sensor出帧帧率的1/n),可以根据需求控制每一帧的buffer打包,并决定是否collect此路流的buffer(比如sensor出帧帧率为120fps,预览流的帧率为30fps,CollectBuffer线程collect预览流的buffer时,每隔4fps collect一次)。
开发指导
场景介绍
Camera模块主要针对相机预览、拍照、视频流等场景,对这些场景下的相机操作进行封装,使开发者更易操作相机硬件,提高开发效率。
接口说明
注:以下接口列举的为IDL接口描述生成的对应C++语言函数接口,接口声明见idl文件(/drivers/interface/camera/v1_0/)。
在HDI使用中下发的配置参数不能超出GetCameraAbility上报的能力范围。即使通过UpdateSettings、CommitStreams、Capture等接口可以下发超出该范围的配置参数,且接口调用不会返回失败,但设置后的行为是不确定的。
- icamera_device.h
| 功能描述 | 接口名称 |
|---|---|
| 获取流控制器 | int32_t GetStreamOperator(const sptr sptr |
| 更新设备控制参数 | int32_t UpdateSettings(const std::vector<uint8_t>& settings) |
| 设置Result回调模式和回调函数 | int32_t SetResultMode(ResultCallbackMode mode) |
| 获取使能的ResultMeta | int32_t GetEnabledResults(std::vector<int32_t>& results) |
| 使能具体的ResultMeta | int32_t EnableResult(const std::vector<int32_t>& results) |
| 禁止具体的ResultMeta | int32_t DisableResult(const std::vector<int32_t>& results) |
| 关闭Camera设备 | int32_t Close() |
- icamera_device_callback.h
| 功能描述 | 接口名称 |
|---|---|
| 设备发生错误时调用,由调用者实现,用于返回错误信息给调用者 | int32_t OnError(ErrorType type, int32_t errorCode) |
| 上报camera设备相关的metadata的回调 | int32_t OnResult(uint64_t timestamp, const std::vector<uint8_t>& result) |
- icamera_host.h
| 功能描述 | 接口名称 |
|---|---|
| 设置ICameraHost回调接口 | int32_t SetCallback(const sptr |
| 获取当前可用的Camera设备ID列表 | int32_t GetCameraIds(std::vectorstd::string& cameraIds) |
| 获取Camera设备能力集合 | int32_t GetCameraAbility(const std::string& cameraId, std::vector<uint8_t>& cameraAbility) |
| 打开Camera设备 | int32_t OpenCamera(const std::string& cameraId, const sptr sptr |
| 打开或关闭闪光灯 | int32_t SetFlashlight(const std::string& cameraId, bool isEnable) |
- icamera_host_callback.h
| 功能描述 | 接口名称 |
|---|---|
| Camera设备状态变化上报 | int32_t OnCameraStatus(const std::string& cameraId, CameraStatus status) |
| 闪光灯状态变化回调 | int32_t OnFlashlightStatus(const std::string& cameraId, FlashlightStatus status) |
| Camera事件回调 | int32_t OnCameraEvent(const std::string& cameraId, CameraEvent event) |
- ioffline_stream_operator.h
| 功能描述 | 接口名称 |
|---|---|
| 取消捕获请求 | int32_t CancelCapture(int32_t captureId) |
| 释放流 | int32_t ReleaseStreams(const std::vector<int32_t>& streamIds) |
| 释放所有离线流 | int32_t Release() |
- istream_operator.h
| 功能描述 | 接口名称 |
|---|---|
| 查询是否支持添加参数对应的流 | int32_t IsStreamsSupported( OperationMode mode, const std::vector<uint8_t>& modeSetting, const std::vector StreamSupportType& type) |
| 创建流 | int32_t CreateStreams(const std::vector |
| 释放流 | int32_t ReleaseStreams(const std::vector<int32_t>& streamIds) |
| 配置流 | int32_t CommitStreams(OperationMode mode, const std::vector<uint8_t>& modeSetting) |
| 获取流的属性 | int32_t GetStreamAttributes(std::vector |
| 绑定生产者句柄和指定流 | int32_t AttachBufferQueue(int32_t streamId, const sptr |
| 解除生产者句柄和指定流的绑定关系 | int32_t DetachBufferQueue(int32_t streamId) |
| 捕获图像 | int32_t Capture(int32_t captureId, const CaptureInfo& info, bool isStreaming) |
| 取消捕获 | int32_t CancelCapture(int32_t captureId) |
| 将指定流转换成离线流 | int32_t ChangeToOfflineStream(const std::vector<int32_t>& streamIds, const sptr sptr |
- istream_operator_callback.h
| 功能描述 | 接口名称 |
|---|---|
| 捕获开始回调,在捕获开始时调用 | int32_t OnCaptureStarted(int32_t captureId, const std::vector<int32_t>& streamIds) |
| 捕获结束回调,在捕获结束时调用 | int32_t OnCaptureEnded(int32_t captureId, const std::vector |
| 捕获错误回调,在捕获过程中发生错误时调用 | int32_t OnCaptureError(int32_t captureId, const std::vector |
| 帧捕获回调 | int32_t OnFrameShutter(int32_t captureId, const std::vector<int32_t>& streamIds, uint64_t timestamp) |
开发步骤
Camera驱动的开发过程主要包含以下步骤:
-
注册CameraHost
定义Camera的HdfDriverEntry结构体,该结构体中定义了CameraHost初始化的方法(代码目录drivers/peripheral/camera/interfaces/hdi_ipc/camera_host_driver.cpp)。
struct HdfDriverEntry g_cameraHostDriverEntry = { .moduleVersion = 1, .moduleName = "camera_service", .Bind = HdfCameraHostDriverBind, .Init = HdfCameraHostDriverInit, .Release = HdfCameraHostDriverRelease, }; HDF_INIT(g_cameraHostDriverEntry); // 将Camera的HdfDriverEntry结构体注册到HDF上 -
初始化Host服务
步骤1中提到的HdfCameraHostDriverBind接口提供了CameraServiceDispatch和CameraHostStubInstance的注册。CameraServiceDispatch接口是远端调用CameraHost的方法,如OpenCamera(),SetFlashlight()等,CameraHostStubInstance接口是Camera设备的初始化,在开机时被调用。
static int HdfCameraHostDriverBind(struct HdfDeviceObject *deviceObject) { HDF_LOGI("HdfCameraHostDriverBind enter"); auto *hdfCameraHostHost = new (std::nothrow) HdfCameraHostHost; if (hdfCameraHostHost == nullptr) { HDF_LOGE("%{public}s: failed to create HdfCameraHostHost object", __func__); return HDF_FAILURE; } hdfCameraHostHost->ioService.Dispatch = CameraHostDriverDispatch; // 提供远端CameraHost调用方法 hdfCameraHostHost->ioService.Open = NULL; hdfCameraHostHost->ioService.Release = NULL; auto serviceImpl = ICameraHost::Get(true); if (serviceImpl == nullptr) { HDF_LOGE("%{public}s: failed to get of implement service", __func__); delete hdfCameraHostHost; return HDF_FAILURE; } hdfCameraHostHost->stub = OHOS::HDI::ObjectCollector::GetInstance().GetOrNewObject(serviceImpl, ICameraHost::GetDescriptor()); // 初始化Camera设备 if (hdfCameraHostHost->stub == nullptr) { HDF_LOGE("%{public}s: failed to get stub object", __func__); delete hdfCameraHostHost; return HDF_FAILURE; } deviceObject->service = &hdfCameraHostHost->ioService; return HDF_SUCCESS; }下面的函数是远端CameraHost调用的方法:
int32_t CameraHostStub::CameraHostServiceStubOnRemoteRequest(int cmdId, MessageParcel &data, MessageParcel &reply, MessageOption &option) { switch(cmdId) { case CMD_CAMERA_HOST_SET_CALLBACK: { return CameraHostStubSetCallback(data, reply, option); } case CMD_CAMERA_HOST_GET_CAMERAID: { return CameraHostStubGetCameraIds(data, reply, option); } case CMD_CAMERA_HOST_GET_CAMERA_ABILITY: { return CameraHostStubGetCameraAbility(data, reply, option); } case CMD_CAMERA_HOST_OPEN_CAMERA: { return CameraHostStubOpenCamera(data, reply, option); } case CMD_CAMERA_HOST_SET_FLASH_LIGHT: { return CameraHostStubSetFlashlight(data, reply, option); } default: { HDF_LOGE("%s: not support cmd %d", __func__, cmdId); return HDF_ERR_INVALID_PARAM; } } return HDF_SUCCESS; }CameraHostStubInstance()接口最终调用CameraHostImpl::Init()方法,该方法会获取物理Camera,并对DeviceManager和PipelineCore进行初始化。
-
获取Host服务
调用Get()接口从远端CameraService中获取CameraHost对象。get()方法如下:
sptr<ICameraHost> ICameraHost::Get(const char *serviceName) { do { using namespace OHOS::HDI::ServiceManager::V1_0; auto servMgr = IServiceManager::Get(); if (servMgr == nullptr) { HDF_LOGE("%s: IServiceManager failed!", __func__); break; } auto remote = servMgr->GetService(serviceName); // 根据serviceName名称获取CameraHost if (remote != nullptr) { sptr<CameraHostProxy> hostSptr = iface_cast<CameraHostProxy>(remote); // 将CameraHostProxy对象返回给调用者,该对象中包含OpenCamera()等方法。 return hostSptr; } HDF_LOGE("%s: GetService failed! serviceName = %s", __func__, serviceName); } while(false); HDF_LOGE("%s: get %s failed!", __func__, serviceName); return nullptr; } -
打开设备
CameraHostProxy对象中有五个方法,分别是SetCallback、GetCameraIds、GetCameraAbility、OpenCamera和SetFlashlight。下面着重描述OpenCamera接口。 CameraHostProxy的OpenCamera()接口通过CMD_CAMERA_HOST_OPEN_CAMERA调用远端CameraHostStubOpenCamera()接口并获取ICameraDevice对象。
int32_t CameraHostProxy::OpenCamera(const std::string& cameraId, const sptr<ICameraDeviceCallback>& callbackObj, sptr<ICameraDevice>& device) { MessageParcel cameraHostData; MessageParcel cameraHostReply; MessageOption cameraHostOption(MessageOption::TF_SYNC); if (!cameraHostData.WriteInterfaceToken(ICameraHost::GetDescriptor())) { HDF_LOGE("%{public}s: failed to write interface descriptor!", __func__); return HDF_ERR_INVALID_PARAM; } if (!cameraHostData.WriteCString(cameraId.c_str())) { HDF_LOGE("%{public}s: write cameraId failed!", __func__); return HDF_ERR_INVALID_PARAM; } if (!cameraHostData.WriteRemoteObject(OHOS::HDI::ObjectCollector::GetInstance().GetOrNewObject(callbackObj, ICameraDeviceCallback::GetDescriptor()))) { HDF_LOGE("%{public}s: write callbackObj failed!", __func__); return HDF_ERR_INVALID_PARAM; } int32_t cameraHostRet = Remote()->SendRequest(CMD_CAMERA_HOST_OPEN_CAMERA, cameraHostData, cameraHostReply, cameraHostOption); if (cameraHostRet != HDF_SUCCESS) { HDF_LOGE("%{public}s failed, error code is %{public}d", __func__, cameraHostRet); return cameraHostRet; } device = hdi_facecast<ICameraDevice>(cameraHostReply.ReadRemoteObject()); return cameraHostRet; }Remote()->SendRequest调用上文提到的CameraHostServiceStubOnRemoteRequest(),根据cmdId进入CameraHostStubOpenCamera()接口,最终调用CameraHostImpl::OpenCamera(),该接口获取了CameraDevice并对硬件进行上电等操作。
int32_t CameraHostImpl::OpenCamera(const std::string& cameraId, const sptr<ICameraDeviceCallback>& callbackObj, sptr<ICameraDevice>& device) { CAMERA_LOGD("OpenCamera entry"); DFX_LOCAL_HITRACE_BEGIN; if (CameraIdInvalid(cameraId) != RC_OK || callbackObj == nullptr) { CAMERA_LOGW("open camera id is empty or callback is null."); return INVALID_ARGUMENT; } auto itr = cameraDeviceMap_.find(cameraId); if (itr == cameraDeviceMap_.end()) { CAMERA_LOGE("camera device not found."); return INSUFFICIENT_RESOURCES; } CAMERA_LOGD("OpenCamera cameraId find success."); std::shared_ptr<CameraDeviceImpl> cameraDevice = itr->second; if (cameraDevice == nullptr) { CAMERA_LOGE("camera device is null."); return INSUFFICIENT_RESOURCES; } CamRetCode ret = cameraDevice->SetCallback(callbackObj); CHECK_IF_NOT_EQUAL_RETURN_VALUE(ret, HDI::Camera::V1_0::NO_ERROR, ret); CameraHostConfig *config = CameraHostConfig::GetInstance(); CHECK_IF_PTR_NULL_RETURN_VALUE(config, INVALID_ARGUMENT); std::vector<std::string> phyCameraIds; RetCode rc = config->GetPhysicCameraIds(cameraId, phyCameraIds); if (rc != RC_OK) { CAMERA_LOGE("get physic cameraId failed."); return DEVICE_ERROR; } if (CameraPowerUp(cameraId, phyCameraIds) != RC_OK) { // 对Camera硬件上电 CAMERA_LOGE("camera powerup failed."); CameraPowerDown(phyCameraIds); return DEVICE_ERROR; } auto sptrDevice = deviceBackup_.find(cameraId); if (sptrDevice == deviceBackup_.end()) { #ifdef CAMERA_BUILT_ON_OHOS_LITE deviceBackup_[cameraId] = cameraDevice; #else deviceBackup_[cameraId] = cameraDevice.get(); #endif } device = deviceBackup_[cameraId]; cameraDevice->SetStatus(true); CAMERA_LOGD("open camera success."); DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
获取流
CameraDeviceImpl定义了GetStreamOperator、UpdateSettings、SetResultMode和GetEnabledResult等方法,获取流操作方法如下:
int32_t CameraDeviceImpl::GetStreamOperator(const sptr<IStreamOperatorCallback>& callbackObj, sptr<IStreamOperator>& streamOperator) { HDI_DEVICE_PLACE_A_WATCHDOG; DFX_LOCAL_HITRACE_BEGIN; if (callbackObj == nullptr) { CAMERA_LOGW("input callback is null."); return INVALID_ARGUMENT; } spCameraDeciceCallback_ = callbackObj; if (spStreamOperator_ == nullptr) { #ifdef CAMERA_BUILT_ON_OHOS_LITE // 这里创建一个spStreamOperator_ 对象传递给调用者,以便对stream进行各种操作 spStreamOperator_ = std::make_shared<StreamOperator>(spCameraDeciceCallback_, shared_from_this()); #else spStreamOperator_ = new(std::nothrow) StreamOperator(spCameraDeciceCallback_, shared_from_this()); #endif if (spStreamOperator_ == nullptr) { CAMERA_LOGW("create stream operator failed."); return DEVICE_ERROR; } spStreamOperator_->Init(); ismOperator_ = spStreamOperator_; } streamOperator = ismOperator_; #ifndef CAMERA_BUILT_ON_OHOS_LITE CAMERA_LOGI("CameraDeviceImpl %{public}s: line: %{public}d", __FUNCTION__, __LINE__); pipelineCore_->GetStreamPipelineCore()->SetCallback( [this](const std::shared_ptr<CameraMetadata> &metadata) { OnMetadataChanged(metadata); }); #endif DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
创建流
调用CreateStreams创建流前需要填充StreamInfo结构体,具体内容如下:
using StreamInfo = struct _StreamInfo { int streamId_; int width_; // 数据流宽 int height_; // 数据流高 int format_; // 数据流格式,如PIXEL_FMT_YCRCB_420_SP int dataSpace_; StreamIntent intent_; // StreamIntent 如PREVIEW bool tunneledMode_; BufferProducerSequenceable bufferQueue_; // 数据流bufferQueue可用streamCustomer->CreateProducer()接口创建 int minFrameDuration_; EncodeType encodeType_; };CreateStreams()接口是StreamOperator(StreamOperatorImpl类是StreamOperator的基类)类中的方法,该接口的主要作用是创建一个StreamBase对象,通过StreamBase的Init方法初始化CreateBufferPool等操作。
int32_t StreamOperator::CreateStreams(const std::vector<StreamInfo>& streamInfos) { PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; for (const auto& it : streamInfos) { CHECK_IF_NOT_EQUAL_RETURN_VALUE(CheckStreamInfo(it), true, INVALID_ARGUMENT); CAMERA_LOGI("streamId:%{public}d and format:%{public}d and width:%{public}d and height:%{public}d", it.streamId_, it.format_, it.width_, it.height_); if (streamMap_.count(it.streamId_) > 0) { CAMERA_LOGE("stream [id = %{public}d] has already been created.", it.streamId_); return INVALID_ARGUMENT; } std::shared_ptr<IStream> stream = StreamFactory::Instance().CreateShared( // 创建Stream实例 IStream::g_availableStreamType[it.intent_], it.streamId_, it.intent_, pipelineCore_, messenger_); if (stream == nullptr) { CAMERA_LOGE("create stream [id = %{public}d] failed.", it.streamId_); return INSUFFICIENT_RESOURCES; } StreamConfiguration scg; StreamInfoToStreamConfiguration(scg, it); RetCode rc = stream->ConfigStream(scg); if (rc != RC_OK) { CAMERA_LOGE("configure stream %{public}d failed", it.streamId_); return INVALID_ARGUMENT; } if (!scg.tunnelMode && (it.bufferQueue_)->producer_ != nullptr) { CAMERA_LOGE("stream [id:%{public}d] is not tunnel mode, can't bind a buffer producer", it.streamId_); return INVALID_ARGUMENT; } if ((it.bufferQueue_)->producer_ != nullptr) { auto tunnel = std::make_shared<StreamTunnel>(); CHECK_IF_PTR_NULL_RETURN_VALUE(tunnel, INSUFFICIENT_RESOURCES); rc = tunnel->AttachBufferQueue((it.bufferQueue_)->producer_); CHECK_IF_NOT_EQUAL_RETURN_VALUE(rc, RC_OK, INVALID_ARGUMENT); if (stream->AttachStreamTunnel(tunnel) != RC_OK) { CAMERA_LOGE("attach buffer queue to stream [id = %{public}d] failed", it.streamId_); return INVALID_ARGUMENT; } } { std::lock_guard<std::mutex> l(streamLock_); streamMap_[stream->GetStreamId()] = stream; } CAMERA_LOGI("create stream success [id:%{public}d] [type:%{public}s]", stream->GetStreamId(), IStream::g_availableStreamType[it.intent_].c_str()); } DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
配置流
CommitStreams()是配置流的接口,必须在创建流之后调用,其主要作用是初始化Pipeline和创建Pipeline。
int32_t StreamOperator::CommitStreams(OperationMode mode, const std::vector<uint8_t>& modeSetting) { CAMERA_LOGV("enter"); CHECK_IF_PTR_NULL_RETURN_VALUE(streamPipeline_, DEVICE_ERROR); PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); if (modeSetting.empty()) { CAMERA_LOGE("input vector is empty"); return INVALID_ARGUMENT; } DFX_LOCAL_HITRACE_BEGIN; std::vector<StreamConfiguration> configs = {}; { std::lock_guard<std::mutex> l(streamLock_); std::transform(streamMap_.begin(), streamMap_.end(), std::back_inserter(configs), [](auto &iter) { return iter.second->GetStreamAttribute(); }); } std::shared_ptr<CameraMetadata> setting; MetadataUtils::ConvertVecToMetadata(modeSetting, setting); DynamicStreamSwitchMode method = streamPipeline_->CheckStreamsSupported(mode, setting, configs); if (method == DYNAMIC_STREAM_SWITCH_NOT_SUPPORT) { return INVALID_ARGUMENT; } if (method == DYNAMIC_STREAM_SWITCH_NEED_INNER_RESTART) { std::lock_guard<std::mutex> l(streamLock_); for (auto it : streamMap_) { it.second->StopStream(); } } { std::lock_guard<std::mutex> l(streamLock_); for (auto it : streamMap_) { if (it.second->CommitStream() != RC_OK) { CAMERA_LOGE("commit stream [id = %{public}d] failed.", it.first); return DEVICE_ERROR; } } } RetCode rc = streamPipeline_->PreConfig(setting); // 设备流配置 if (rc != RC_OK) { CAMERA_LOGE("prepare mode settings failed"); return DEVICE_ERROR; } rc = streamPipeline_->CreatePipeline(mode); // 创建一个pipeline if (rc != RC_OK) { CAMERA_LOGE("create pipeline failed."); return INVALID_ARGUMENT; } DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
捕获图像
在调用Capture()接口前需要先填充CaptureInfo结构体,具体内容如下:
using CaptureInfo = struct _CaptureInfo { int[] streamIds_; // 需要Capture的streamIds unsigned char[] captureSetting_; // 这里填充camera ability 可通过CameraHost 的GetCameraAbility()接口获取 bool enableShutterCallback_; };StreamOperator中的Capture方法主要是捕获数据流:
int32_t StreamOperator::Capture(int32_t captureId, const CaptureInfo& info, bool isStreaming) { CHECK_IF_EQUAL_RETURN_VALUE(captureId < 0, true, INVALID_ARGUMENT); PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; for (auto id : info.streamIds_) { std::lock_guard<std::mutex> l(streamLock_); auto it = streamMap_.find(id); if (it == streamMap_.end()) { return INVALID_ARGUMENT; } } { std::lock_guard<std::mutex> l(requestLock_); auto itr = requestMap_.find(captureId); if (itr != requestMap_.end()) { return INVALID_ARGUMENT; } } std::shared_ptr<CameraMetadata> captureSetting; MetadataUtils::ConvertVecToMetadata(info.captureSetting_, captureSetting); CaptureSetting setting = captureSetting; auto request = std::make_shared<CaptureRequest>(captureId, info.streamIds_.size(), setting, info.enableShutterCallback_, isStreaming); for (auto id : info.streamIds_) { RetCode rc = streamMap_[id]->AddRequest(request); if (rc != RC_OK) { return DEVICE_ERROR; } } { std::lock_guard<std::mutex> l(requestLock_); requestMap_[captureId] = request; } return HDI::Camera::V1_0::NO_ERROR; } -
取消捕获和释放离线流
StreamOperator类中的CancelCapture()接口的主要作用是根据captureId取消数据流的捕获。
int32_t StreamOperator::CancelCapture(int32_t captureId) { CHECK_IF_EQUAL_RETURN_VALUE(captureId < 0, true, INVALID_ARGUMENT); PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; std::lock_guard<std::mutex> l(requestLock_); auto itr = requestMap_.find(captureId); // 根据captureId 在Map中查找对应的CameraCapture对象 if (itr == requestMap_.end()) { CAMERA_LOGE("can't cancel capture [id = %{public}d], this capture doesn't exist", captureId); return INVALID_ARGUMENT; } RetCode rc = itr->second->Cancel(); // 调用CameraCapture中Cancel方法结束数据捕获 if (rc != RC_OK) { return DEVICE_ERROR; } requestMap_.erase(itr); // 擦除该CameraCapture对象 DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; }StreamOperator类中的ReleaseStreams接口的主要作用是释放之前通过CreateStream()和CommitStreams()接口创建的流,并销毁Pipeline。
int32_t StreamOperator::ReleaseStreams(const std::vector<int32_t>& streamIds) { PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; for (auto id : streamIds) { std::lock_guard<std::mutex> l(streamLock_); auto it = streamMap_.find(id); if (it == streamMap_.end()) { continue; } if (it->second->IsRunning()) { it->second->StopStream(); } it->second->DumpStatsInfo(); streamMap_.erase(it); } for (auto id : streamIds) { CHECK_IF_EQUAL_RETURN_VALUE(id < 0, true, INVALID_ARGUMENT); } DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
关闭Camera设备
调用CameraDeviceImpl中的Close()来关闭CameraDevice,该接口调用deviceManager中的PowerDown()来给设备下电。
开发实例
在/drivers/peripheral/camera/hal/init目录下有一个关于Camera的demo,开机后会在/vendor/bin下生成可执行文件ohos_camera_demo,该demo可以完成Camera的预览,拍照等基础功能。下面我们就以此demo为例讲述怎样用HDI接口去编写预览PreviewOn()和拍照CaptureON()的用例,可参考ohos_camera_demo。
-
在main函数中构造一个CameraDemo 对象,该对象中有对Camera初始化、启停流、释放等控制的方法。下面mainDemo->InitSensors()函数为初始化CameraHost,mainDemo->InitCameraDevice()函数为初始化CameraDevice。
int main(int argc, char** argv) { RetCode rc = RC_OK; auto mainDemo = std::make_shared<CameraDemo>(); rc = mainDemo->InitSensors(); // 初始化CameraHost if (rc == RC_ERROR) { CAMERA_LOGE("main test: mainDemo->InitSensors() error\n"); return -1; } rc = mainDemo->InitCameraDevice(); // 初始化CameraDevice if (rc == RC_ERROR) { CAMERA_LOGE("main test: mainDemo->InitCameraDevice() error\n"); return -1; } rc = PreviewOn(0, mainDemo); // 配流和启流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn() error demo exit"); return -1; } ManuList(mainDemo, argc, argv); // 打印菜单到控制台 return RC_OK; }初始化CameraHost函数实现如下,这里调用了HDI接口ICameraHost::Get()去获取demoCameraHost,并对其设置回调函数。
RetCode OhosCameraDemo::InitSensors() { int rc = 0; CAMERA_LOGD("demo test: InitSensors enter"); if (demoCameraHost_ != nullptr) { return RC_OK; } #ifdef CAMERA_BUILT_ON_OHOS_LITE demoCameraHost_ = OHOS::Camera::CameraHost::CreateCameraHost(); #else constexpr const char *DEMO_SERVICE_NAME = "camera_service"; demoCameraHost_ = ICameraHost::Get(DEMO_SERVICE_NAME, false); #endif if (demoCameraHost_ == nullptr) { CAMERA_LOGE("demo test: ICameraHost::Get error"); return RC_ERROR; } #ifdef CAMERA_BUILT_ON_OHOS_LITE hostCallback_ = std::make_shared<DemoCameraHostCallback>(); #else hostCallback_ = new DemoCameraHostCallback(); #endif rc = demoCameraHost_->SetCallback(hostCallback_); if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: demoCameraHost_->SetCallback(hostCallback_) error"); return RC_ERROR; } CAMERA_LOGD("demo test: InitSensors exit"); return RC_OK; }初始化CameraDevice函数实现如下,这里调用了GetCameraIds(cameraIds_),GetCameraAbility(cameraId, ability_),OpenCamera(cameraIds_.front(), callback, demoCameraDevice_)等接口实现了demoCameraHost的获取。
RetCode OhosCameraDemo::InitCameraDevice() { int rc = 0; CAMERA_LOGD("demo test: InitCameraDevice enter"); if (demoCameraHost_ == nullptr) { CAMERA_LOGE("demo test: InitCameraDevice demoCameraHost_ == nullptr"); return RC_ERROR; } (void)demoCameraHost_->GetCameraIds(cameraIds_); if (cameraIds_.empty()) { return RC_ERROR; } const std::string cameraId = cameraIds_.front(); demoCameraHost_->GetCameraAbility(cameraId, cameraAbility_); MetadataUtils::ConvertVecToMetadata(cameraAbility_, ability_); GetFaceDetectMode(ability_); GetFocalLength(ability_); GetAvailableFocusModes(ability_); GetAvailableExposureModes(ability_); GetExposureCompensationRange(ability_); GetExposureCompensationSteps(ability_); GetAvailableMeterModes(ability_); GetAvailableFlashModes(ability_); GetMirrorSupported(ability_); GetStreamBasicConfigurations(ability_); GetFpsRange(ability_); GetCameraPosition(ability_); GetCameraType(ability_); GetCameraConnectionType(ability_); GetFaceDetectMaxNum(ability_); #ifdef CAMERA_BUILT_ON_OHOS_LITE std::shared_ptr<CameraDeviceCallback> callback = std::make_shared<CameraDeviceCallback>(); #else sptr<DemoCameraDeviceCallback> callback = new DemoCameraDeviceCallback(); #endif rc = demoCameraHost_->OpenCamera(cameraIds_.front(), callback, demoCameraDevice_); if (rc != HDI::Camera::V1_0::NO_ERROR || demoCameraDevice_ == nullptr) { CAMERA_LOGE("demo test: InitCameraDevice OpenCamera failed"); return RC_ERROR; } CAMERA_LOGD("demo test: InitCameraDevice exit"); return RC_OK; } -
PreviewOn()接口包含配置流、开启预览流和启动Capture动作。该接口执行完成后Camera预览通路已经开始运转并开启了两路流,一路流是preview,另外一路流是capture或者video,两路流中仅对preview流进行capture动作。
static RetCode PreviewOn(int mode, const std::shared_ptr<OhosCameraDemo>& mainDemo) { RetCode rc = RC_OK; CAMERA_LOGD("main test: PreviewOn enter"); rc = mainDemo->StartPreviewStream(); // 配置preview流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn StartPreviewStream error"); return RC_ERROR; } if (mode == 0) { rc = mainDemo->StartCaptureStream(); // 配置capture流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn StartCaptureStream error"); return RC_ERROR; } } else { rc = mainDemo->StartVideoStream(); // 配置video流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn StartVideoStream error"); return RC_ERROR; } } rc = mainDemo->CaptureON(STREAM_ID_PREVIEW, CAPTURE_ID_PREVIEW, CAPTURE_PREVIEW); if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn mainDemo->CaptureON() preview error"); return RC_ERROR; } CAMERA_LOGD("main test: PreviewOn exit"); return RC_OK; }StartCaptureStream()、StartVideoStream()和StartPreviewStream()接口都会调用CreateStream()接口,只是传入的参数不同。
CreateStream()方法调用HDI接口去配置和创建流,首先调用HDI接口去获取StreamOperation对象,然后创建一个StreamInfo。调用CreateStreams()和CommitStreams()实际创建流并配置流。
RetCode OhosCameraDemo::CreateStream(const int streamId, std::shared_ptr<StreamCustomer> &streamCustomer, StreamIntent intent) { int rc = 0; CAMERA_LOGD("demo test: CreateStream enter"); GetStreamOpt(); // 获取StreamOperator对象 if (streamOperator_ == nullptr) { CAMERA_LOGE("demo test: CreateStream GetStreamOpt() is nullptr\n"); return RC_ERROR; } StreamInfo streamInfo = {0}; SetStreamInfo(streamInfo, streamCustomer, streamId, intent); // 填充StreamInfo流 if (streamInfo.bufferQueue_->producer_ == nullptr) { CAMERA_LOGE("demo test: CreateStream CreateProducer(); is nullptr\n"); return RC_ERROR; } std::vector<StreamInfo> streamInfos; streamInfos.push_back(streamInfo); rc = streamOperator_->CreateStreams(streamInfos); // 创建流 if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: CreateStream CreateStreams error\n"); return RC_ERROR; } rc = streamOperator_->CommitStreams(NORMAL, cameraAbility_); if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: CreateStream CommitStreams error\n"); std::vector<int> streamIds; streamIds.push_back(streamId); streamOperator_->ReleaseStreams(streamIds); return RC_ERROR; } CAMERA_LOGD("demo test: CreateStream exit"); return RC_OK; }CaptureON()接口调用streamOperator的Capture()方法获取Camera数据并轮转buffer,拉起一个线程接收相应类型的数据。
RetCode OhosCameraDemo::CaptureON(const int streamId, const int captureId, CaptureMode mode) { CAMERA_LOGI("demo test: CaptureON enter streamId == %{public}d and captureId == %{public}d and mode == %{public}d", streamId, captureId, mode); std::lock_guard<std::mutex> l(metaDatalock_); if (mode == CAPTURE_SNAPSHOT) { constexpr double latitude = 27.987500; // dummy data: Qomolangma latitde constexpr double longitude = 86.927500; // dummy data: Qomolangma longituude constexpr double altitude = 8848.86; // dummy data: Qomolangma altitude constexpr size_t entryCapacity = 100; constexpr size_t dataCapacity = 2000; captureSetting_ = std::make_shared<CameraSetting>(entryCapacity, dataCapacity); captureQuality_ = OHOS_CAMERA_JPEG_LEVEL_HIGH; captureOrientation_ = OHOS_CAMERA_JPEG_ROTATION_270; mirrorSwitch_ = OHOS_CAMERA_MIRROR_ON; gps_.push_back(latitude); gps_.push_back(longitude); gps_.push_back(altitude); captureSetting_->addEntry(OHOS_JPEG_QUALITY, static_cast<void*>(&captureQuality_), sizeof(captureQuality_)); captureSetting_->addEntry(OHOS_JPEG_ORIENTATION, static_cast<void*>(&captureOrientation_), sizeof(captureOrientation_)); captureSetting_->addEntry(OHOS_CONTROL_CAPTURE_MIRROR, static_cast<void*>(&mirrorSwitch_), sizeof(mirrorSwitch_)); captureSetting_->addEntry(OHOS_JPEG_GPS_COORDINATES, gps_.data(), gps_.size()); } std::vector<uint8_t> setting; MetadataUtils::ConvertMetadataToVec(captureSetting_, setting); captureInfo_.streamIds_ = {streamId}; if (mode == CAPTURE_SNAPSHOT) { captureInfo_.captureSetting_ = setting; } else { captureInfo_.captureSetting_ = cameraAbility_; } captureInfo_.enableShutterCallback_ = false; int rc = streamOperator_->Capture(captureId, captureInfo_, true); // 实际capture开始,buffer轮转开始 if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: CaptureStart Capture error\n"); streamOperator_->ReleaseStreams(captureInfo_.streamIds_); return RC_ERROR; } if (mode == CAPTURE_PREVIEW) { streamCustomerPreview_->ReceiveFrameOn(nullptr); // 创建预览线程接收传递上来的buffer } else if (mode == CAPTURE_SNAPSHOT) { streamCustomerCapture_->ReceiveFrameOn([this](void* addr, const uint32_t size) { // 创建capture线程通过StoreImage回调接收传递上来的buffer StoreImage(addr, size); }); } else if (mode == CAPTURE_VIDEO) { OpenVideoFile(); streamCustomerVideo_->ReceiveFrameOn([this](void* addr, const uint32_t size) { // 创建video线程通过StoreImage回调接收传递上来的buffer StoreVideo(addr, size); }); } CAMERA_LOGD("demo test: CaptureON exit"); return RC_OK; } -
ManuList()函数从控制台通过fgets()接口获取字符,不同字符所对应demo支持的功能不同,并打印出该demo所支持功能的菜单。
static void ManuList(const std::shared_ptr<OhosCameraDemo>& mainDemo, const int argc, char** argv) { int idx, c; bool isAwb = true; const char *shortOptions = "h:cwvaeqof:"; c = getopt_long(argc, argv, shortOptions, LONG_OPTIONS, &idx); while (1) { switch (c) { case 'h': c = PutMenuAndGetChr(); // 打印菜单 break; case 'f': FlashLightTest(mainDemo); // 手电筒功能测试 c = PutMenuAndGetChr(); break; case 'o': OfflineTest(mainDemo); // Offline功能测试 c = PutMenuAndGetChr(); break; case 'c': CaptureTest(mainDemo); // Capture功能测试 c = PutMenuAndGetChr(); break; case 'w': // AWB功能测试 if (isAwb) { mainDemo->SetAwbMode(OHOS_CAMERA_AWB_MODE_INCANDESCENT); } else { mainDemo->SetAwbMode(OHOS_CAMERA_AWB_MODE_OFF); } isAwb = !isAwb; c = PutMenuAndGetChr(); break; case 'a': // AE功能测试 mainDemo->SetAeExpo(); c = PutMenuAndGetChr(); break; case 'e': // Metadata测试 mainDemo->SetMetadata(); c = PutMenuAndGetChr(); break; case 'v': // VIDEO功能测试 VideoTest(mainDemo); c = PutMenuAndGetChr(); break; case 'q': // 退出demo PreviewOff(mainDemo); mainDemo->QuitDemo(); return; default: CAMERA_LOGE("main test: command error please retry input command"); c = PutMenuAndGetChr(); break; } } }PutMenuAndGetChr()接口打印了demo程序的菜单,并调用fgets()等待从控制台输入命令,内容如下:
static int PutMenuAndGetChr(void) { constexpr uint32_t inputCount = 50; int c = 0; char strs[inputCount]; Usage(stdout); CAMERA_LOGD("pls input command(input -q exit this app)\n"); fgets(strs, inputCount, stdin); for (int i = 0; i < inputCount; i++) { if (strs[i] != '-') { c = strs[i]; break; } } return c; }控制台输出菜单详情如下:
"Options:\n" "-h | --help Print this message\n" "-o | --offline stream offline test\n" "-c | --capture capture one picture\n" "-w | --set WB Set white balance Cloudy\n" "-v | --video capture Video of 10s\n" "-a | --Set AE Set Auto exposure\n" "-e | --Set Metadeta Set Metadata\n" "-f | --Set Flashlight Set flashlight ON 5s OFF\n" "-q | --quit stop preview and quit this app\n"); -
编译用例
在drivers/peripheral/camera/hal/BUILD.gn文件中的deps中添加“init:ohos_camera_demo”,示例代码如下:deps = [ "buffer_manager:camera_buffer_manager", "device_manager:camera_device_manager", "hdi_impl:camera_host_service_1.0", "pipeline_core:camera_pipeline_core", "utils:camera_utils", "init:ohos_camera_demo", ]以RK3568为例:
- 执行全量编译命令./build.sh --product-name rk3568 --ccache,生成可执行二进制文件ohos_camera_demo,路径为:out/rk3568/packages/phone/vendor/bin/。
- 将可执行文件ohos_camera_demo导入开发板,修改权限直接运行即可。