Motion
概述
功能简介
手势识别模块作为端侧设备不可或缺的一部分,为用户提供手势识别控制能力。当前支持的手势识别类型有拿起、翻转、摇一摇、旋转屏等。
基于HDF(Hardware Driver Foundation)驱动框架开发的Motion驱动,能够屏蔽硬件器件差异,为上层MSDP(Multimodal Sensor Data Platform)服务层提供稳定的手势识别控制能力接口,包括手势识别使能/去使能、手势识别订阅/取消订阅等。
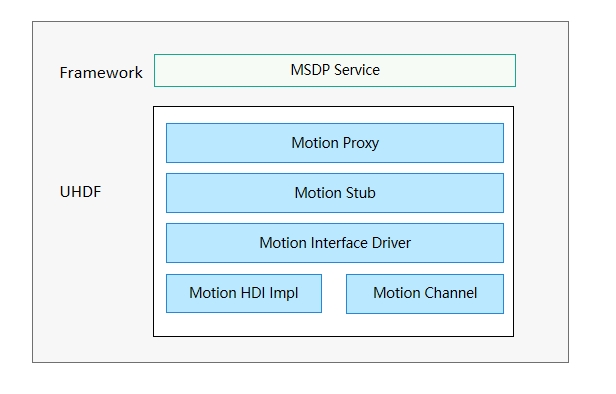
Motion驱动框架如图1所示,上层为Framework层,提供MSDP服务,通过UHDF(User Hardware Driver Foundation)层的Motion Proxy与Motion Stub进行交互;而Motion Stub可调用Motion HDI实现类接口,从而实现上层服务的手势识别使能/去使能、手势识别订阅/取消订阅等能力。
图1 Motion驱动框架
运作机制
通过介绍Motion驱动模型的加载以及运行流程,对模型内部关键组件以及关联组件之间的关系进行了划分,整体加载流程如图2所示:
图 2 Motion驱动运行图
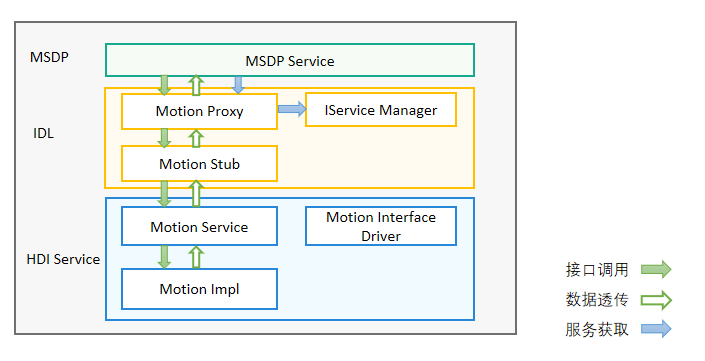
- MSDP:上层综合传感信息处理平台服务层,当HDI接口服务实例获取成功后可以直接调用Motion HDI接口。
- IDL:接口抽象层。MSDP服务层首先从Motion Proxy获取到Motion HDI接口服务实例。而Motion Proxy获取到的接口实例是由IService Manager进行分配。当MSDP服务层成功获取到Motion HDI接口服务实例后,MSDP服务层就可以直接调用Motion Proxy中的HDI接口,然后通过IPC(Inter-Process Communication)调用到Motion Stub,从而调用到Motion Service的接口。这部分是由工具自动生成的代码,不用器件厂商自己开发。
- HDI Service:HDI Service中包括Motion Interface Driver、Motion Service和Motion Impl三个部分。其中Motion Interface Driver为手势识别接口的驱动代码,在这部分驱动代码中通过定义一个struct HdfDriverEntry类型的结构体变量,实现此变量中的的Init、Bind和Release函数描述驱动能力,函数内部通过HDF_INIT宏加载驱动。Motion Service为手势识别服务接口类,具体的实现在Motion Impl中描述。此部分代码需要器件厂商根据自己器件来开发。
开发指导
场景介绍
Motion驱动的主要工作是为上层MSDP服务提供稳定的使能/去使能手势识别服务,订阅/取消订阅手势识别数据回调函数的功能。可应用于拿起、翻转、摇一摇、旋转屏等手势识别场景。
接口说明
表1 接口功能介绍
| 接口名 | 功能介绍 |
|---|---|
| int32_t EnableMotion(int32_t motionType) | 使能一种手势识别类型,只有数据订阅者使能手势识别后,才能获取订阅的手势识别数据。 |
| int32_t DisableMotion(int32_t motionType) | 去使能手势识别。 |
| int32_t Register(const sptr<IMotionCallback> &callbackObj) | 订阅者成功注册手势识别数据回调函数,系统会将获取到的手势识别数据上报给订阅者。 |
| int32_t Unregister(const sptr<IMotionCallback> &callbackObj) | 取消订阅手势识别数据回调函数。 |
开发步骤
开发步骤分为两个大步骤。
- 基于HDF驱动框架,完成手势识别用户态驱动开发。
- 厂商实现EnableMotion、DisableMotion、Register和Unregister接口功能。
手势识别目录结构及各部分功能简介。
/drivers/peripheral/motion # 此目录具体实现需要厂商根据自己的器件进行开发
├── hdi_service # 手势识别模块对上层MSDP服务提供的驱动能力
├── test # 手势识别模块测试代码
│ └── unittest\hdi # 手势识别模块HDI单元测试代码
下面结合DEMO实例,介绍如何基于HDF驱动框架,进行手势识别用户态驱动开发。具体实现请参考motion_interface_driver.cpp。
手势识别用户态驱动开发, 主要完成Bind、Init、Release、Dispatch函数接口实现。其中Bind函数为驱动绑定对外提供的服务能力,Init函数为系统加载驱动前需要的一些初始化的操作,Release函数的主要作用为当系统加载驱动调用Init函数失败时对资源进行回收操作,Dispatch函数为服务能力的具体实现,在Bind函数中进行绑定。
// 自定义的HdfMotionInterfaceHost对象
struct HdfMotionInterfaceHost {
struct IDeviceIoService ioService;
OHOS::sptr<OHOS::IRemoteObject> stub;
};
// 服务接口调用响应接口
static int32_t MotionInterfaceDriverDispatch(struct HdfDeviceIoClient *client, int cmdId, struct HdfSBuf *data,
struct HdfSBuf *reply)
{
auto *hdfMotionInterfaceHost = CONTAINER_OF(client->device->service, struct HdfMotionInterfaceHost, ioService);
OHOS::MessageParcel *dataParcel = nullptr;
OHOS::MessageParcel *replyParcel = nullptr;
OHOS::MessageOption option;
if (SbufToParcel(data, &dataParcel) != HDF_SUCCESS) {
HDF_LOGE("%{public}s: invalid data sbuf object to dispatch", __func__);
return HDF_ERR_INVALID_PARAM;
}
if (SbufToParcel(reply, &replyParcel) != HDF_SUCCESS) {
HDF_LOGE("%{public}s: invalid reply sbuf object to dispatch", __func__);
return HDF_ERR_INVALID_PARAM;
}
return hdfMotionInterfaceHost->stub->SendRequest(cmdId, *dataParcel, *replyParcel, option);
}
// 初始化接口
int HdfMotionInterfaceDriverInit(struct HdfDeviceObject *deviceObject)
{
HDF_LOGI("HdfMotionInterfaceDriverInit enter");
return HDF_SUCCESS;
}
// Motion驱动对外提供的服务绑定到HDF框架
int HdfMotionInterfaceDriverBind(struct HdfDeviceObject *deviceObject)
{
HDF_LOGI("HdfMotionInterfaceDriverBind enter");
auto *hdfMotionInterfaceHost = new (std::nothrow) HdfMotionInterfaceHost;
if (hdfMotionInterfaceHost == nullptr) {
HDF_LOGE("%{public}s: failed to create HdfMotionInterfaceHost object", __func__);
return HDF_FAILURE;
}
hdfMotionInterfaceHost->ioService.Dispatch = MotionInterfaceDriverDispatch;
hdfMotionInterfaceHost->ioService.Open = NULL;
hdfMotionInterfaceHost->ioService.Release = NULL;
auto serviceImpl = IMotionInterface::Get(true);
if (serviceImpl == nullptr) {
HDF_LOGE("%{public}s: failed to get of implement service", __func__);
return HDF_FAILURE;
}
hdfMotionInterfaceHost->stub = OHOS::HDI::ObjectCollector::GetInstance().GetOrNewObject(serviceImpl,
IMotionInterface::GetDescriptor());
if (hdfMotionInterfaceHost->stub == nullptr) {
HDF_LOGE("%{public}s: failed to get stub object", __func__);
return HDF_FAILURE;
}
deviceObject->service = &hdfMotionInterfaceHost->ioService;
return HDF_SUCCESS;
}
// 释放Motion驱动中的资源
void HdfMotionInterfaceDriverRelease(struct HdfDeviceObject *deviceObject)
{
HDF_LOGI("HdfMotionInterfaceDriverRelease enter");
auto *hdfMotionInterfaceHost = CONTAINER_OF(deviceObject->service, struct HdfMotionInterfaceHost, ioService);
delete hdfMotionInterfaceHost;
hdfMotionInterfaceHost = nullptr;
}
// 注册Motion驱动入口数据结构体对象
struct HdfDriverEntry g_motioninterfaceDriverEntry = {
.moduleVersion = 1,
.moduleName = "motion_service",
.Bind = HdfMotionInterfaceDriverBind,
.Init = HdfMotionInterfaceDriverInit,
.Release = HdfMotionInterfaceDriverRelease,
};
// 调用HDF_INIT将驱动入口注册到HDF框架中,在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动,当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
HDF_INIT(g_userAuthInterfaceDriverEntry);
调测验证
测试代码开发步骤:
-
通过调用IMotionInterface::Get()获取到手势识别实例,并赋给IMotionInterface类型的智能指针对象g_motionInterface。
-
通过g_motionInterface实例调用Register接口注册回调,回调函数需要根据自己的需求来设计。
-
通过g_motionInterface实例调用EnableMotion接口使能Motion类型,当前支持拿起(HDF_MOTION_TYPE_PICKUP)、翻转(HDF_MOTION_TYPE_FLIP)、摇一摇(HDF_MOTION_TYPE_SHAKE)、旋转(HDF_MOTION_TYPE_ROTATION)等手势识别类型。
-
通过g_motionInterface实例调用DisableMotion接口去使能手势识别类型。
-
通过g_motionInterface实例调用Unregister取消订阅Motion数据回调函数。注意取消订阅必须先调用Register接口注册回调,否则Unregister会返回失败。
测试代码实例如下:
using namespace OHOS::HDI::Motion::V1_0; using namespace testing::ext; namespace { sptr<IMotionInterface> g_motionInterface = nullptr; sptr<IMotionCallback> g_motionCallback = new MotionCallbackService(); sptr<IMotionCallback> g_motionCallbackUnregistered = new MotionCallbackService(); } class HdfMotionTest : public testing::Test { public: static void SetUpTestCase(); static void TearDownTestCase(); void SetUp(); void TearDown(); }; void HdfMotionTest::SetUpTestCase() { // 1.获取手势识别实例 g_motionInterface = IMotionInterface::Get(); } void HdfMotionTest::TearDownTestCase() { } void HdfMotionTest::SetUp() { } void HdfMotionTest::TearDown() { } HWTEST_F(HdfMotionTest, EnableMotion_001, TestSize.Level1) { if (g_motionInterface == nullptr) { ASSERT_NE(nullptr, g_motionInterface); return; } vector<int> vec; vec.push_back(HDF_MOTION_TYPE_PICKUP); vec.push_back(HDF_MOTION_TYPE_FLIP); vec.push_back(HDF_MOTION_TYPE_SHAKE); vec.push_back(HDF_MOTION_TYPE_ROTATION); // 2.订阅手势识别数据回调函数 int32_t ret = g_motionInterface->Register(g_motionCallback); EXPECT_EQ(HDF_SUCCESS, ret); for (int i = 0; i < vec.size(); i++) { // 3.使能手势识别 ret = g_motionInterface->EnableMotion(vec[i]); if (ret == HDF_SUCCESS) { printf("Motion %d enabled successfully\n", vec[i]); } else { printf("Motion %d enable failed\n", vec[i]); } EXPECT_EQ(HDF_SUCCESS, ret); OsalSleep(15); // 4.去使能手势识别 ret = g_motionInterface->DisableMotion(vec[i]); if (ret == HDF_SUCCESS) { printf("Motion %d disabled successfully\n", vec[i]); } else { printf("Motion %d disable failed\n", vec[i]); } EXPECT_EQ(HDF_SUCCESS, ret); OsalSleep(2); } // 5.取消订阅手势识别数据回调函数 ret = g_motionInterface->Unregister(g_motionCallback); EXPECT_EQ(HDF_SUCCESS, ret); }