Sensor
概述
功能简介
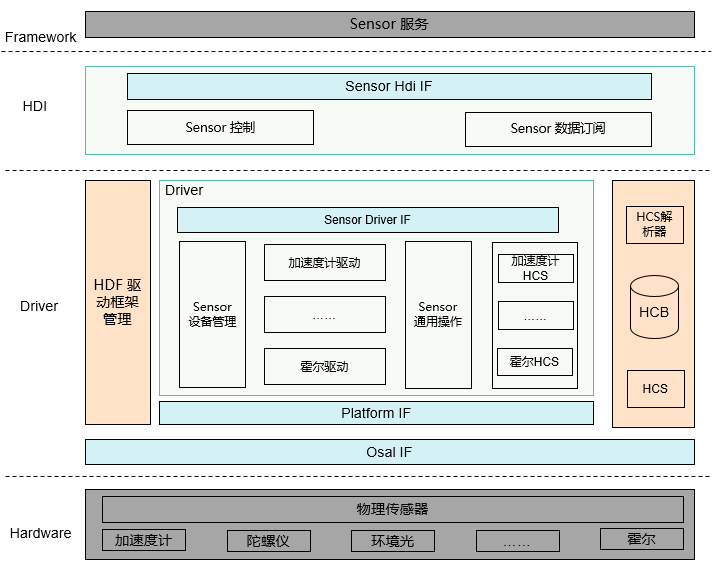
Sensor驱动模型屏蔽硬件器件差异,为上层Sensor服务系统提供稳定的Sensor基础能力接口,包括Sensor列表查询、Sensor启停、Sensor订阅及取消订阅,Sensor参数配置等功能。Sensor设备驱动的开发是基于HDF驱动框架基础上,结合操作系统适配层(OSAL)和平台驱动接口(比如I2C/SPI/UART总线等平台资源)能力,屏蔽不同操作系统和平台总线资源差异,实现Sensor驱动“一次开发,多系统部署”的目标。Sensor驱动模型如图1所示。
图 1 Sensor驱动模型图
基本概念
目前根据sensorId将Sensor分为医学类Sensor、传统类Sensor两种。
-
医学类Sensor:已订阅的sensorId枚举值在128-160范围的为医学类Sensor。
-
传统类Sensor:已订阅的sensorId枚举值不在128-160范围的为传统类Sensor。
运作机制
通过介绍Sensor驱动模型的加载以及运行流程,对模型内部关键组件以及关联组件之间的关系进行了划分,整体加载流程如图2所示:
图 2 Sensor驱动运行图
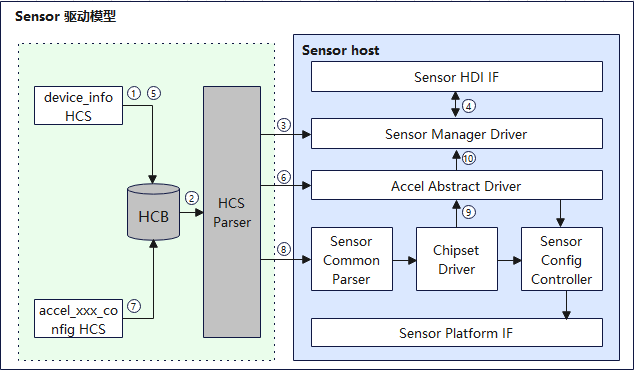
Sensor驱动模型以标准系统Hi3516DV300产品中的加速度传感器驱动为例,介绍整个驱动加载及运行流程:
- 从device_info.hcs配置文件中的Sensor Host读取到Sensor设备管理配置信息。
- HDF配置框架从HCB数据库中解析Sensor设备管理配置信息,并关联对应设备驱动。
- 加载并初始化Sensor设备管理驱动。
- Sensor设备管理驱动向HDI发布Sensor基础能力接口。
- 从device_info.hcs配置文件中的Sensor Host读取到加速度传感器驱动配置信息。
- 加载加速度传感器抽象驱动,调用初始化接口,完成Sensor器件的驱动资源分配和数据处理队列的创建。
- 从accel_xxx_config.hcs配置文件中读取到加速度传感器差异化驱动配置和私有化配置信息。
- 加速度传感器芯片差异化驱动,调用通用配置解析接口,完成器件属性信息解析,器件寄存器解析。
- 加速度传感器芯片差异化驱动完成器件的探测,并分配加速度传感器配置资源和加速度传感器差异化接口注册。
- 加速度传感器成功探测到器件之后,加速度传感器芯片差异化驱动通知加速度传感器抽象驱动,注册加速度传感器设备到Sensor设备管理中。
开发指导
场景介绍
- 通过重力和陀螺仪传感器数据,能感知设备倾斜和旋转量,提高用户在游戏场景中的体验。
- 通过接近光传感器数据,感知距离遮挡物的距离,使设备能够自动亮灭屏,达到防误触目的。例如,手机通话时,如屏幕距离人脸过近,则自动关闭屏幕,防止误触的同时降低功耗。
- 通过气压计传感器数据,可以准确的判断设备当前所处的海拔。
- 通过环境光传感器数据,设备能够实现背光自动调节。
- 通过霍尔传感器数据,设备可以实现皮套功能,皮套合上,手机上开一个小窗口,可降低功耗。
接口说明
Sensor驱动模型对外开放的API接口能力如下:
- 提供Sensor HDI(Hardware Device Interface)能力接口,简化服务开发。
- 提供Sensor驱动模型能力接口:
- 依赖HDF驱动框架实现Sensor器件驱动的加载、器件探测、注册和去注册等能力。
- 提供同一类型Sensor器件驱动归一接口、寄存器配置解析操作接口、总线访问抽象接口和平台抽象接口。
- 提供开发者实现的能力接口:依赖HDF驱动框架的HCS(HDF Configuration Source)配置管理,根据同类型Sensor差异化配置,实现Sensor器件参数序列化配置和器件部分操作接口,简化Sensor器件驱动开发。
Sensor驱动模型对外开放的API接口能力的具体实现请参考:
表 1 Sensor驱动模型对外API接口功能介绍
| 接口名 | 功能描述 |
|---|---|
| int32_t GetAllSensors(struct SensorInformation **sensorInfo, int32_t *count) | 获取系统中注册的所有传感器信息,一组完整传感器信息包括传感器名字、设备厂商、固件版本号、硬件版本号、传感器类型编号、传感器标识、最大量程、精度、功耗。 |
| int32_t Enable(int32_t sensorId) | 使能指定传感器设备,只有数据订阅者使能传感器后,才能获取订阅的传感器数据。 |
| int32_t Disable(int32_t sensorId) | 去使能指定传感器设备。 |
| int32_t SetBatch(int32_t sensorId, int64_t samplingInterval, int64_t reportInterval) | 设置指定传感器的数据采样间隔和数据上报间隔。 |
| int32_t SetMode(int32_t sensorId, int32_t mode) | 设置指定传感器的工作模式,不同的工作模式,上报数据方式不同。 |
| int32_t SetOption(int32_t sensorId, uint32_t option) | 设置指定传感器量程,精度等可选配置。 |
| int32_t Register(int32_t groupId, RecordDataCallback cb) | 订阅者根据不同groupId注册传感器数据回调函数,系统会将获取到的传感器数据上报给订阅者。 |
| int32_t Unregister(int32_t groupId, RecordDataCallback cb) | 订阅者根据groupId和回调函数注销对应订阅者的传感器数据回调函数。 |
Sensor驱动模型对驱动开发者开放的功能接口,驱动开发者无需实现,直接使用,请参考:
表2 Sensor驱动模型对驱动开发者开放的功能接口列表
| 接口名 | 功能描述 |
|---|---|
| int32_t AddSensorDevice(const struct SensorDeviceInfo *deviceInfo) | 添加当前类型的传感器设备到传感器设备管理。 |
| int32_t DeleteSensorDevice(const struct SensorBasicInfo *sensorBaseInfo) | 删除传感器设备管理里指定的传感器设备。 |
| int32_t ReportSensorEvent(const struct SensorReportEvent *events) | 上报指定类型传感器的数据到用户侧。 |
| int32_t ReadSensor(struct SensorBusCfg *busCfg, uint16_t regAddr, uint8_t *data, uint16_t dataLen) | 按照配置的总线方式,读取传感器寄存器配置数据。 |
| int32_t WriteSensor(struct SensorBusCfg *busCfg, uint8_t *writeData, uint16_t len) | 按照配置的总线方式,将传感器配置数据写入寄存器。 |
| int32_t SetSensorRegCfgArray(struct SensorBusCfg *busCfg, const struct SensorRegCfgGroupNode *group); | 根据传感器总线类型信息,下发寄存器分组配置。 |
| int32_t GetSensorBaseConfigData(const struct DeviceResourceNode *node, struct SensorCfgData *config) | 根据传感器设备HCS资源配置,获取传感器信息,总线配置信息,属性配置等基本配置信息,并初始化对应的基本配置数据结构体。 |
| int32_t ParseSensorRegConfig(struct SensorCfgData *config) | 根据传感器设备HCS资源配置,解析寄存器分组信息,并初始化配置数据结构体。 |
| void ReleaseSensorAllRegConfig(struct SensorCfgData *config) | 释放传感器配置数据结构体里分配的资源。 |
| int32_t GetSensorBusHandle(struct SensorBusCfg *busCfg) | 获取传感器总线句柄信息。 |
| int32_t ReleaseSensorBusHandle(struct SensorBusCfg *busCfg) | 释放传感器句柄信息。 |
Sensor驱动模型要求驱动开发者实现的接口功能,请参考:
表 3 Sensor驱动模型要求驱动开发者实现的接口列表
| 接口名 | 功能描述 |
|---|---|
| int32_t init(void) | 传感器设备探测成功后,需要对传感器设备初始化配置。 |
| int32_t Enable(void) | 根据当前传感器设备的HCS配置,下发传感器设备使能操作组的寄存器配置。 |
| int32_t Disable(void) | 根据当前传感器设备的HCS配置,下发传感器设备去使能操作组的寄存器配置。 |
| int32_t SetBatch(int64_t samplingInterval, int64_t reportInterval) | 根据数据采样率和数据上报间隔,配置当前传感器设备的数据上报线程处理时间。 |
| int32_t SetMode(int32_t mode) | 配置当前传感器设备数据上报方式。 |
| int32_t SetOption(uint32_t option) | 根据可选配置、下发量程和精度等寄存器配置。 |
| void ReadSensorData(void) | 实现传感器的数据读取函数。 |
接口实现参考开发步骤章节。
开发步骤
-
基于HDF驱动框架,按照驱动Driver Entry程序,完成加速度抽象驱动开发,主要由Bind、Init、Release、Dispatch函数接口实现。
-
加速度传感器驱动入口函数实现
/* 注册加速度计传感器入口数据结构体对象 */ struct HdfDriverEntry g_sensorAccelDevEntry = { .moduleVersion = 1, // 加速度计传感器模块版本号 .moduleName = "HDF_SENSOR_ACCEL", // 加速度计传感器模块名,要与device_info.hcs文件里的加速度计moduleName字段值一样 .Bind = BindAccelDriver, // 加速度计传感器绑定函数 .Init = InitAccelDriver, // 加速度计传感器初始化函数 .Release = ReleaseAccelDriver, // 加速度计传感器资源释放函数 }; /* 调用HDF_INIT将驱动入口注册到HDF框架中。在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出 */ HDF_INIT(g_sensorAccelDevEntry); -
加速度传感器驱动操作接口实现
/* 加速度计传感器驱动对外提供的服务绑定到HDF框架 */ int32_t AccelBindDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM); struct AccelDrvData *drvData = (struct AccelDrvData *)OsalMemCalloc(sizeof(*drvData)); if (drvData == NULL) { HDF_LOGE("%s: Malloc accel drv data fail!", __func__); return HDF_ERR_MALLOC_FAIL; } drvData->ioService.Dispatch = DispatchAccel; drvData->device = device; device->service = &drvData->ioService; g_accelDrvData = drvData; return HDF_SUCCESS; } /* 注册加速度计传感器驱动归一化的接口函数 */ static int32_t InitAccelOps(struct SensorCfgData *config, struct SensorDeviceInfo *deviceInfo) { CHECK_NULL_PTR_RETURN_VALUE(config, HDF_ERR_INVALID_PARAM); deviceInfo->ops.Enable = SetAccelEnable; deviceInfo->ops.Disable = SetAccelDisable; deviceInfo->ops.SetBatch = SetAccelBatch; deviceInfo->ops.SetMode = SetAccelMode; deviceInfo->ops.SetOption = SetAccelOption; if (memcpy_s(&deviceInfo->sensorInfo, sizeof(deviceInfo->sensorInfo), &config->sensorInfo, sizeof(config->sensorInfo)) != EOK) { HDF_LOGE("%s: Copy sensor info failed", __func__); return HDF_FAILURE; } return HDF_SUCCESS; } /* 提供给差异化驱动的初始化接口,完成加速度器件基本配置信息解析(加速度信息、加速度总线配置、加速度器件探测寄存器配置)、器件探测、器件寄存器解析 */ static int32_t InitAccelAfterDetected(struct SensorCfgData *config) { struct SensorDeviceInfo deviceInfo; CHECK_NULL_PTR_RETURN_VALUE(config, HDF_ERR_INVALID_PARAM); /* 初始化加速度计接口函数 */ if (InitAccelOps(config, &deviceInfo) != HDF_SUCCESS) { HDF_LOGE("%s: Init accel ops failed", __func__); return HDF_FAILURE; } /* 注册加速度计设备到传感器管理模块 */ if (AddSensorDevice(&deviceInfo) != HDF_SUCCESS) { HDF_LOGE("%s: Add accel device failed", __func__); return HDF_FAILURE; } /* 器件寄存器解析 */ if (ParseSensorRegConfig(config) != HDF_SUCCESS) { HDF_LOGE("%s: Parse sensor register failed", __func__); (void)DeleteSensorDevice(&config->sensorInfo); ReleaseSensorAllRegConfig(config); return HDF_FAILURE; } return HDF_SUCCESS; } struct SensorCfgData *AccelCreateCfgData(const struct DeviceResourceNode *node) { …… /* 如果探测不到器件在位,返回进行下个器件探测 */ if (drvData->detectFlag) { HDF_LOGE("%s: Accel sensor have detected", __func__); return NULL; } if (drvData->accelCfg == NULL) { HDF_LOGE("%s: Accel accelCfg pointer NULL", __func__); return NULL; } /* 设备基本配置信息解析 */ if (GetSensorBaseConfigData(node, drvData->accelCfg) != HDF_SUCCESS) { HDF_LOGE("%s: Get sensor base config failed", __func__); goto BASE_CONFIG_EXIT; } /* 如果探测不到器件在位,返回进行下个器件探测 */ if (DetectSensorDevice(drvData->accelCfg) != HDF_SUCCESS) { HDF_LOGI("%s: Accel sensor detect device no exist", __func__); drvData->detectFlag = false; goto BASE_CONFIG_EXIT; } drvData->detectFlag = true; /* 器件寄存器解析 */ if (InitAccelAfterDetected(drvData->accelCfg) != HDF_SUCCESS) { HDF_LOGE("%s: Accel sensor detect device no exist", __func__); goto INIT_EXIT; } return drvData->accelCfg; …… } /* 加速度计传感器驱动初始化入口函数,主要功能为对传感器私有数据的结构体对象进行初始化,传感器HCS数据配置对象空间分配,传感器HCS数据配置初始化入口函数调用,传感器设备探测是否在位功能,传感器数据上报定时器创建,传感器归一化接口注册,传感器设备注册功能 */ int32_t AccelInitDriver(struct HdfDeviceObject *device) { …… /* 工作队列资源初始化 */ if (InitAccelData(drvData) != HDF_SUCCESS) { HDF_LOGE("%s: Init accel config failed", __func__); return HDF_FAILURE; } /* 分配加速度配置信息资源 */ drvData->accelCfg = (struct SensorCfgData *)OsalMemCalloc(sizeof(*drvData->accelCfg)); if (drvData->accelCfg == NULL) { HDF_LOGE("%s: Malloc accel config data failed", __func__); return HDF_FAILURE; } /* 注册寄存器分组信息 */ drvData->accelCfg->regCfgGroup = &g_regCfgGroup[0]; …… return HDF_SUCCESS; } /* 释放驱动初始化时分配的资源 */ void AccelReleaseDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN(device); struct AccelDrvData *drvData = (struct AccelDrvData *)device->service; CHECK_NULL_PTR_RETURN(drvData); /* 器件在位,释放已分配资源 */ if (drvData->detectFlag) { AccelReleaseCfgData(drvData->accelCfg); } OsalMemFree(drvData->accelCfg); drvData->accelCfg = NULL; /* 器件在位,销毁工作队列资源 */ HdfWorkDestroy(&drvData->accelWork); HdfWorkQueueDestroy(&drvData->accelWorkQueue); OsalMemFree(drvData); }
-
-
完成加速度传感器驱动的设备信息配置。
加速度传感器模型使用HCS作为配置描述源码,HCS配置字段请参考配置管理介绍。
/* 加速度计传感器设备HCS配置 */ device_sensor_accel :: device { device0 :: deviceNode { policy = 1; // 驱动服务发布的策略 priority = 110; // 驱动启动优先级(0-200),值越大优先级越低,建议配置为100,优先级相同则不保证device的加载顺序 preload = 0; // 驱动按需加载字段,0表示加载,2表示不加载 permission = 0664; // 驱动创建设备节点权限 moduleName = "HDF_SENSOR_ACCEL"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致 serviceName = "sensor_accel"; // 驱动对外发布服务的名称,必须唯一 deviceMatchAttr = "hdf_sensor_accel_driver"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等 } } -
完成加速度传感器抽象驱动内部接口开发,包括Enable、Disable、SetBatch、SetMode、SetOption、AccelCreateCfgData、AccelReleaseCfgData、AccelRegisterChipOps接口实现。
/* 不使用函数暂时置空 */ static int32_t SetAccelInfo(struct SensorBasicInfo *info) { (void)info; return HDF_ERR_NOT_SUPPORT; } /* 下发使能寄存器组的配置 */ static int32_t SetAccelEnable(void) { int32_t ret; struct AccelDrvData *drvData = AccelGetDrvData(); CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); CHECK_NULL_PTR_RETURN_VALUE(drvData->accelCfg, HDF_ERR_INVALID_PARAM); if (drvData->enable) { HDF_LOGE("%s: Accel sensor is enabled", __func__); return HDF_SUCCESS; } ret = SetSensorRegCfgArray(&drvData->accelCfg->busCfg, drvData->accelCfg->regCfgGroup[SENSOR_ENABLE_GROUP]); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel sensor enable config failed", __func__); return ret; } ret = OsalTimerCreate(&drvData->accelTimer, SENSOR_TIMER_MIN_TIME, AccelTimerEntry, (uintptr_t)drvData); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel create timer failed[%d]", __func__, ret); return ret; } ret = OsalTimerStartLoop(&drvData->accelTimer); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel start timer failed[%d]", __func__, ret); return ret; } drvData->enable = true; return HDF_SUCCESS; } /* 下发去使能寄存器组的配置 */ static int32_t SetAccelDisable(void) { int32_t ret; struct AccelDrvData *drvData = AccelGetDrvData(); CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); CHECK_NULL_PTR_RETURN_VALUE(drvData->accelCfg, HDF_ERR_INVALID_PARAM); if (!drvData->enable) { HDF_LOGE("%s: Accel sensor had disable", __func__); return HDF_SUCCESS; } ret = SetSensorRegCfgArray(&drvData->accelCfg->busCfg, drvData->accelCfg->regCfgGroup[SENSOR_DISABLE_GROUP]); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel sensor disable config failed", __func__); return ret; } ret = OsalTimerDelete(&drvData->accelTimer); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Accel delete timer failed", __func__); return ret; } drvData->enable = false; return HDF_SUCCESS; } /* 配置传感器采样率和数据上报间隔 */ static int32_t SetAccelBatch(int64_t samplingInterval, int64_t interval) { (void)interval; struct AccelDrvData *drvData = NULL; drvData = AccelGetDrvData(); CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); drvData->interval = samplingInterval; return HDF_SUCCESS; } /* 设置传感器工作模式,当前支持实时模式 */ static int32_t SetAccelMode(int32_t mode) { return (mode == SENSOR_WORK_MODE_REALTIME) ? HDF_SUCCESS : HDF_FAILURE; } static int32_t SetAccelOption(uint32_t option) { (void)option; return HDF_SUCCESS; } /* 设置传感器可选配置 */ static int32_t SetAccelOption(uint32_t option) { (void)option; return HDF_ERR_NOT_SUPPORT; } -
基于HDF驱动框架,按照驱动Driver Entry程序,完成加速度传感器差异化驱动开发,主要由Bind、Init、Release、Dispatch函数接口实现。
/* 加速度计传感器差异化驱动消息交互 */ static int32_t DispatchBMI160(struct HdfDeviceIoClient *client, int cmd, struct HdfSBuf *data, struct HdfSBuf *reply) { (void)client; (void)cmd; (void)data; (void)reply; return HDF_SUCCESS; } /* 加速度计传感器差异化驱动对外提供的服务绑定到HDF框架 */ int32_t Bmi160BindDriver(struct HdfDeviceObject *device) { CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM); struct Bmi160DrvData *drvData = (struct Bmi160DrvData *)OsalMemCalloc(sizeof(*drvData)); if (drvData == NULL) { HDF_LOGE("%s: Malloc Bmi160 drv data fail", __func__); return HDF_ERR_MALLOC_FAIL; } drvData->ioService.Dispatch = DispatchBMI160; drvData->device = device; device->service = &drvData->ioService; g_bmi160DrvData = drvData; return HDF_SUCCESS; } /* 加速度计传感器差异化驱动初始化 */ int32_t Bmi160InitDriver(struct HdfDeviceObject *device) { int32_t ret; struct AccelOpsCall ops; CHECK_NULL_PTR_RETURN_VALUE(device, HDF_ERR_INVALID_PARAM); struct Bmi160DrvData *drvData = (struct Bmi160DrvData *)device->service; CHECK_NULL_PTR_RETURN_VALUE(drvData, HDF_ERR_INVALID_PARAM); ret = InitAccelPreConfig(); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Init BMI160 bus mux config", __func__); return HDF_FAILURE; } drvData->sensorCfg = AccelCreateCfgData(device->property); if (drvData->sensorCfg == NULL || drvData->sensorCfg->root == NULL) { HDF_LOGD("%s: Creating accelcfg failed because detection failed", __func__); return HDF_ERR_NOT_SUPPORT; } ops.Init = NULL; ops.ReadData = ReadBmi160Data; ret = AccelRegisterChipOps(&ops); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Register BMI160 accel failed", __func__); return HDF_FAILURE; } ret = InitBmi160(drvData->sensorCfg); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: Init BMI160 accel failed", __func__); return HDF_FAILURE; } return HDF_SUCCESS; } /* 释放驱动初始化时分配的资源 */ void Bmi160ReleaseDriver(struct HdfDeviceObject *device) { ...... if (drvData->sensorCfg != NULL) { AccelReleaseCfgData(drvData->sensorCfg); drvData->sensorCfg = NULL; } OsalMemFree(drvData); } /* 加速度传感器差异化驱动对应的HdfDriverEntry对象 */ struct HdfDriverEntry g_accelBmi160DevEntry = { .moduleVersion = 1, .moduleName = "HDF_SENSOR_ACCEL_BMI160", .Bind = Bmi160BindDriver, .Init = Bmi160InitDriver, .Release = Bmi160ReleaseDriver, }; HDF_INIT(g_accelBmi160DevEntry); -
完成加速度传感器差异化驱动中差异化接口ReadData函数实现。
int32_t ReadBmi160Data(struct SensorCfgData *data) { int32_t ret; struct AccelData rawData = { 0, 0, 0 }; int32_t tmp[ACCEL_AXIS_NUM]; struct SensorReportEvent event; (void)memset_s(&event, sizeof(event), 0, sizeof(event)); ret = ReadBmi160RawData(data, &rawData, &event.timestamp); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: BMI160 read raw data failed", __func__); return HDF_FAILURE; } event.sensorId = SENSOR_TAG_ACCELEROMETER; event.option = 0; event.mode = SENSOR_WORK_MODE_REALTIME; …… ret = ReportSensorEvent(&event); if (ret != HDF_SUCCESS) { HDF_LOGE("%s: BMI160 report data failed", __func__); } return ret; }
调测验证
驱动开发完成后,在传感器单元测试里面开发自测试用例,验证驱动基本功能。测试环境采用开发者自测试平台。
static int32_t g_sensorDataFlag = 0; // 标识是否上报传感器数据
static const struct SensorInterface *g_sensorDev = nullptr; // 保持获取的传感器接口实例地址
/* 订阅者注册数据上报函数 */
static int SensorTestDataCallback(struct SensorEvents *event)
{
if (event == nullptr) {
return -1;
}
float *data = (float*)event->data;
printf("time [%lld] sensor id [%d] x-[%f] y-[%f] z-[%f]\n\r", event->timestamp,
event->sensorId, (*data), *(data + 1), *(data + g_axisZ));
if (*data > 1e-5) {
g_sensorDataFlag = 1;
}
return 0;
}
/* 用例执行前,初始化传感器接口实例 */
void HdfSensorTest::SetUpTestCase()
{
g_sensorDev = NewSensorInterfaceInstance();
if (g_sensorDev == nullptr) {
printf("test sensor get module instance failed\n\r");
}
}
/* 用例资源释放 */
void HdfSensorTest::TearDownTestCase()
{
if (g_sensorDev != nullptr) {
FreeSensorInterfaceInstance();
g_sensorDev = nullptr;
}
}
/* 传感器驱动测试验证 */
HWTEST_F(HdfSensorTest,TestAccelDriver_001, TestSize.Level0)
{
int32_t sensorInterval = 1000000000; // 数据采样率单位纳秒
int32_t pollTime = 5; // 数据采样时间单位秒
int32_t accelSensorId = 1; // 加速度传感器类型标识为1
int32_t count = 0;
int ret;
struct SensorInformation *sensorInfo = nullptr;
ret = g_sensorDev->Register(0, TraditionSensorTestDataCallback)
EXPECT_EQ(SENSOR_NULL_PTR, ret);
ret = g_sensorDev->GetAllSensors(&sensorInfo, &count);
EXPECT_EQ(0, ret);
if (sensorInfo == nullptr) {
EXPECT_NE(nullptr, sensorInfo);
return;
}
/* 打印获取的传感器列表 */
for (int i = 0; i < count; i++) {
printf("get sensorId[%d], info name[%s]\n\r", sensorInfo[i]->sensorId, sensorInfo[i]->sensorName);
}
ret = g_sensorDev->Enable(accelSensorId);
EXPECT_EQ(0, ret);
g_sensorDataFlag = 0;
ret = g_sensorDev->SetBatch(accelSensorId, sensorInterval, pollTime);
EXPECT_EQ(0, ret);
/* 在时间pollTime内,观察输出打印数据 */
OsalSleep(pollTime);
EXPECT_EQ(1, g_sensorDataFlag);
ret = g_sensorDev->Disable(accelSensorId);
g_sensorDataFlag = 0;
EXPECT_EQ(0, ret);
ret = g_sensorDev->Unregister(0, TraditionSensorTestDataCallback);
EXPECT_EQ(0, ret);
}