DAC
概述
功能简介
DAC(Digital to Analog Converter)是一种通过电流、电压或电荷的形式将数字信号转换为模拟信号的设备。
DAC模块支持数模转换的开发。它主要用于:
-
作为过程控制计算机系统的输出通道,与执行器相连,实现对生产过程的自动控制。
-
在利用反馈技术的模数转换器设计中,作为重要的功能模块呈现。
基本概念
-
分辨率
分辨率指的是D/A转换器能够转换的二进制位数,位数越多分辨率越高。
-
转换精度
精度是指输入端加有最大数值时,DAC的实际输出值和理论计算值之差,DAC转换器的转换精度与DAC转换器的集成芯片结构和接口电路配置有关。理想情况下,DAC的转换精度越小越好,因此为了获得更高精度的DAC转换结果,首先要保证选择的DAC转换器具备足够高的分辨率。其次,要保证接口电路的器件或电源误差最小或者不存在误差,否则会造成DAC转换的误差,若这些误差超过一定程度,就会导致DAC转换错误。
-
转换速度
转换速度一般由建立时间决定。从输入由全0突变为全1时开始,到输出电压稳定在FSR±½LSB范围(或以FSR±x%FSR指明范围)内为止,这段时间称为建立时间,它是DAC的最大响应时间,所以用它衡量转换速度的快慢。
-
满量程范围FSR(Full Scale Range),是指DAC输出信号幅度的最大范围,不同的DAC有不同的满量程范围,该范围可以用正、负电流或者正、负电压来限制。
-
最低有效位LSB(Least Significant Byte),指的是一个二进制数字中的第0位(即最低位)。
-
运作机制
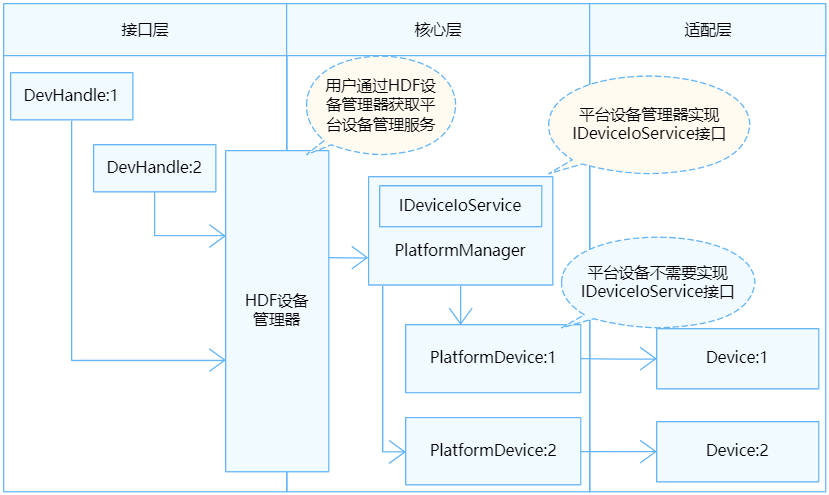
在HDF框架中,同类型设备对象较多时(可能同时存在十几个同类型配置器),若采用独立服务模式,则需要配置更多的设备节点,且相关服务会占据更多的内存资源。相反,采用统一服务模式可以使用一个设备服务作为管理器,统一处理所有同类型对象的外部访问(这会在配置文件中有所体现),实现便捷管理和节约资源的目的。DAC模块即采用统一服务模式(如图1所示)。
DAC模块各分层的作用为:
-
接口层:提供打开设备、写入数据和关闭设备接口的能力。
-
核心层:主要提供绑定设备、初始化设备以及释放设备的能力。
-
适配层:由驱动适配者实现与硬件相关的具体功能,如控制器的初始化等。
在统一模式下,所有的控制器都被核心层统一管理,并由核心层统一发布一个服务供接口层,因此这种模式下驱动无需再为每个控制器发布服务。
![]() 说明:
说明:
核心层可以调用接口层的函数,也可以通过钩子函数调用适配层函数,从而使得适配层间接的可以调用接口层函数,但是不可逆转接口层调用适配层函数。
约束与限制
DAC模块当前仅支持轻量和小型系统内核(LiteOS-A)。
开发指导
场景介绍
DAC模块主要在设备中数模转换、音频输出和电机控制等设备使用,设置将DAC模块传入的数字信号转换为输出模拟信号时需要用到DAC数模转换驱动。当驱动开发者需要将DAC设备适配到OpenHarmony时,需要进行DAC驱动适配,下文将介绍如何进行DAC驱动适配。
接口说明
为了保证上层在调用DAC接口时能够正确的操作硬件,核心层在//drivers/hdf_core/framework/support/platform/include/dac/dac_core.h中定义了以下钩子函数。驱动适配者需要在适配层实现这些函数的具体功能,并与这些钩子函数挂接,从而完成接口层与核心层的交互。
DacMethod和DacLockMethod定义:
struct DacMethod {
// 写入数据的钩子函数
int32_t (*write)(struct DacDevice *device, uint32_t channel, uint32_t val);
// 启动DAC设备的钩子函数
int32_t (*start)(struct DacDevice *device);
// 停止DAC设备的钩子函数
int32_t (*stop)(struct DacDevice *device);
};
struct DacLockMethod {
int32_t (*lock)(struct DacDevice *device);
void (*unlock)(struct DacDevice *device);
};
在适配层中,DacMethod必须被实现,DacLockMethod可根据实际情况考虑是否实现。核心层提供了默认的DacLockMethod,其中使用Spinlock作为保护临界区的锁:
static int32_t DacDeviceLockDefault(struct DacDevice *device)
{
if (device == NULL) {
HDF_LOGE("%s: device is null", __func__);
return HDF_ERR_INVALID_OBJECT;
}
return OsalSpinLock(&device->spin);
}
static void DacDeviceUnlockDefault(struct DacDevice *device)
{
if (device == NULL) {
HDF_LOGE("%s: device is null", __func__);
return;
}
(void)OsalSpinUnlock(&device->spin);
}
static const struct DacLockMethod g_dacLockOpsDefault = {
.lock = DacDeviceLockDefault,
.unlock = DacDeviceUnlockDefault,
};
若实际情况不允许使用Spinlock,驱动适配者可以考虑使用其他类型的锁来实现一个自定义的DacLockMethod。一旦实现了自定义的DacLockMethod,默认的DacLockMethod将被覆盖。
表 1 DacMethod结构体成员的钩子函数功能说明
| 函数成员 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| write | device:结构体指针,核心层DAC控制器 channel:uint32_t类型,传入的通道号 val:uint32_t类型,要传入的数据 |
无 | HDF_STATUS相关状态 | 写入DA的目标值 |
| start | device:结构体指针,核心层DAC控制器 | 无 | HDF_STATUS相关状态 | 开启DAC设备 |
| stop | device:结构体指针,核心层DAC控制器 | 无 | HDF_STATUS相关状态 | 关闭DAC设备 |
表 2 DacLockMethod结构体成员函数功能说明
| 函数成员 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| lock | device:结构体指针,核心层DAC设备对象。 | 无 | HDF_STATUS相关状态 | 获取临界区锁 |
| unlock | device:结构体指针,核心层DAC设备对象。 | 无 | HDF_STATUS相关状态 | 释放临界区锁 |
开发步骤
DAC模块适配包含以下四个步骤:
-
实例化驱动入口
-
配置属性文件
-
实例化核心层函数
-
驱动调试
开发实例
下方将Hi3516DV300的驱动//device/soc/hisilicon/common/platform/dac/dac_hi35xx.c为例,展示驱动适配者需要提供哪些内容来完整实现设备功能。
-
实例化驱动入口
驱动开发首先需要实例化驱动入口,驱动入口必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量,且moduleName要和//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs中保持一致。HDF框架会汇总所有加载的驱动的HdfDriverEntry对象入口,形成一个类似数组的段地址空间,方便上层调用。
一般在加载驱动时HDF会先调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
static struct HdfDriverEntry g_dacDriverEntry = { .moduleVersion = 1, .Init = VirtualDacInit, .Release = VirtualDacRelease, .moduleName = "virtual_dac_driver", //【必要且与device_info.hcs文件内的模块名匹配】 }; HDF_INIT(g_dacDriverEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中 // 核心层dac_core.c管理器服务的驱动入口 struct HdfDriverEntry g_dacManagerEntry = { .moduleVersion = 1, .Bind = DacManagerBind, // DAC不需要实现Bind,本例是一个空实现,驱动适配者可根据自身需要添加相关操作 .Init = DacManagerInit, // 见Init参考 .Release = DacManagerRelease, // 见Release参考 .moduleName = "HDF_PLATFORM_DAC_MANAGER", // 这与device_info.hcs文件中device0对应 }; HDF_INIT(g_dacManagerEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中 -
配置属性文件
-
添加//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs器件属性文件。
器件属性值对于驱动适配者的驱动实现以及核心层DacDevice相关成员的默认值或限制范围有密切关系,比如设备通道的个数以及传输速率的最大值,会影响DacDevice相关成员的默认值。
由于采用了统一服务模式,device_info.hcs文件中第一个设备节点必须为DAC管理器,其各项参数如表3所示:
表 3 device_info.hcs节点参数说明
-
| 成员名 | 值 |
|---|---|
| policy | 驱动服务发布的策略,DAC管理器具体配置为2,表示驱动对内核态和用户态都发布服务 |
| priority | 驱动启动优先级(0-200),值越大优先级越低,优先级相同则不保证device的加载顺序。DAC管理器具体配置为52 |
| permission | 驱动创建设备节点权限,DAC管理器具体配置为0664 |
| moduleName | 驱动名称,DAC管理器固定为HDF_PLATFORM_DAC_MANAGER |
| serviceName | 驱动对外发布服务的名称,DAC管理器服务名设置为HDF_PLATFORM_DAC_MANAGER |
| deviceMatchAttr | 驱动私有数据匹配的关键字,DAC管理器没有使用,可忽略 |
从第二个节点开始配置具体DAC控制器信息,此节点并不表示某一路DAC控制器,而是代表一个资源性质设备,用于描述一类DAC控制器的信息。本例只有一个DAC设备,如有多个设备,则需要在device_info.hcs文件增加deviceNode信息,以及在dac_config.hcs文件中增加对应的器件属性。
- device_info.hcs配置参考
```hcs
root {
device_dac :: device {
// device0是DAC管理器
device0 :: deviceNode {
policy = 0;
priority = 52;
permission = 0644;
serviceName = "HDF_PLATFORM_DAC_MANAGER";
moduleName = "HDF_PLATFORM_DAC_MANAGER";
}
}
// dac_virtual是DAC控制器
dac_virtual :: deviceNode {
policy = 0;
priority = 56;
permission = 0644;
moduleName = "virtual_dac_driver"; // 【必要】用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致。
serviceName = "VIRTUAL_DAC_DRIVER"; // 【必要】驱动对外发布服务的名称,必须唯一。
deviceMatchAttr = "virtual_dac"; // 【必要】用于配置控制器私有数据,要与dac_config.hcs中对应控制器保持一致。
}
}
```
- 添加dac_test_config.hcs器件属性文件。
在具体产品对应目录下新增文件用于驱动配置参数(例如hispark_taurus开发板:vendor/hisilicon/hispark_taurus/hdf_config/hdf_test/dac_test_config.hcs),其中配置参数如下:
```hcs
root {
platform {
dac_config {
match_attr = "virtual_dac"; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致
template dac_device {
deviceNum = 0; // 设备号
validChannel = 0x1; // 有效通道1
rate = 20000; // 速率
}
device_0 :: dac_device {
deviceNum = 0; // 设备号
validChannel = 0x2; // 有效通道2
}
}
}
}
```
需要注意的是,新增dac_config.hcs配置文件后,必须在hdf.hcs文件中将其包含,否则配置文件无法生效。
例如:本例中dac_config.hcs所在路径为device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/dac/dac_config.hcs,则必须在产品对应的hdf.hcs中添加如下语句:
```c
#include "../../../../device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/dac/dac_config.hcs" // 配置文件相对路径
```
-
实例化核心层函数
-
初始化DacDevice成员。
在VirtualDacParseAndInit函数中对DacDevice成员进行初始化操作。
// 虚拟驱动自定义结构体 struct VirtualDacDevice { // DAC设备结构体 struct DacDevice device; // DAC设备号 uint32_t deviceNum; // 有效通道 uint32_t validChannel; // DAC速率 uint32_t rate; }; // 解析并且初始化核心层DacDevice对象 static int32_t VirtualDacParseAndInit(struct HdfDeviceObject *device, const struct DeviceResourceNode *node) { // 定义返回值 int32_t ret; // DAC设备虚拟指针 struct VirtualDacDevice *virtual = NULL; (void)device; // 给virtual指针开辟空间 virtual = (struct VirtualDacDevice *)OsalMemCalloc(sizeof(*virtual)); if (virtual == NULL) { // 为空则返回错误参数 HDF_LOGE("%s: Malloc virtual fail!", __func__); return HDF_ERR_MALLOC_FAIL; } // 读取属性文件配置参数 ret = VirtualDacReadDrs(virtual, node); if (ret != HDF_SUCCESS) { // 读取失败 HDF_LOGE("%s: Read drs fail! ret:%d", __func__, ret); // 释放virtual空间 OsalMemFree(virtual); // 指针置为NULL virtual = NULL; return ret; } // 初始化虚拟指针 VirtualDacDeviceInit(virtual); // 对DacDevice中priv对象初始化 virtual->device.priv = (void *)node; // 对DacDevice中devNum对象初始化 virtual->device.devNum = virtual->deviceNum; // 对DacDevice中ops对象初始化 virtual->device.ops = &g_method; // 添加DAC设备 ret = DacDeviceAdd(&virtual->device); if (ret != HDF_SUCCESS) { // 添加设备失败 HDF_LOGE("%s: add Dac controller failed! ret = %d", __func__, ret); // 释放virtual空间 OsalMemFree(virtual); // 虚拟指针置空 virtual = NULL; return ret; } return HDF_SUCCESS; } -
自定义结构体参考。
通过自定义结构体定义DAC数模转换必要的参数,在定义结构体时需要根据设备的功能参数来实现自定义结构体,从驱动的角度看,自定义结构体是参数和数据的载体,dac_config.hcs文件中传递的参数和数据会被HDF驱动模块的DacTestReadConfig函数读入,通过DeviceResourceIface来初始化结构体成员,其中一些重要数值也会传递给核心层DacDevice对象,例如设备号、总线号等。
struct VirtualDacDevice { struct DacDevice device; //【必要】是核心层控制对象,具体描述见下面 uint32_t deviceNum; //【必要】设备号 uint32_t validChannel; //【必要】有效通道 uint32_t rate; //【必要】采样率 }; // DacDevice是核心层控制器结构体,其中的成员在Init函数中会被赋值。 struct DacDevice { const struct DacMethod *ops; OsalSpinlock spin; // 自旋锁 uint32_t devNum; // 设备号 uint32_t chanNum; // 设备通道号 const struct DacLockMethod *lockOps; void *priv; }; -
实例化DacDevice成员DacMethod。
VirtualDacWrite、VirtualDacStop、VirtualDacStart函数会在dac_virtual.c文件中进行模块功能的实例化。
static const struct DacMethod g_method = { .write = VirtualDacWrite, // DAC设备写入值 .stop = VirtualDacStop, // 停止DAC设备 .start = VirtualDacStart, // 开始启动DAC设备 }; 说明:
说明:
DacDevice成员DacMethod的定义和成员说明见接口说明。 -
Init函数开发参考
入参:
HdfDeviceObject这个是整个驱动对外提供的接口参数,具备HCS配置文件的信息。
返回值:
HDF_STATUS相关状态(表4为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS定义)。
表 4 HDF_STATUS相关状态说明
-
| 状态(值) | 问题描述 |
|---|---|
| HDF_ERR_INVALID_OBJECT | 控制器对象非法。 |
| HDF_ERR_INVALID_PARAM | 参数非法。 |
| HDF_ERR_MALLOC_FAIL | 内存分配失败。 |
| HDF_ERR_IO | I/O 错误。 |
| HDF_SUCCESS | 传输成功。 |
| HDF_FAILURE | 传输失败。 |
函数说明:
初始化自定义结构体对象,初始化DacDevice成员,并调用核心层DacDeviceAdd函数。
```c
static int32_t VirtualDacParseAndInit(struct HdfDeviceObject *device, const struct DeviceResourceNode *node)
{
// 定义返回值参数
int32_t ret;
// DAC设备的结构体指针
struct VirtualDacDevice *virtual = NULL;
(void)device;
// 分配指定大小的内存
virtual = (struct VirtualDacDevice *)OsalMemCalloc(sizeof(*virtual));
if (virtual == NULL) {
// 分配内存失败
HDF_LOGE("%s: Malloc virtual fail!", __func__);
return HDF_ERR_MALLOC_FAIL;
}
// 读取hcs中的node节点参数,函数定义见下方
ret = VirtualDacReadDrs(virtual, node);
if (ret != HDF_SUCCESS) {
// 读取节点失败
HDF_LOGE("%s: Read drs fail! ret:%d", __func__, ret);
goto __ERR__;
}
// 初始化DAC设备指针
VirtualDacDeviceInit(virtual);
// 节点数据传入私有数据
virtual->device.priv = (void *)node;
// 传入设备号
virtual->device.devNum = virtual->deviceNum;
// 传入方法
virtual->device.ops = &g_method;
// 添加DAC设备
ret = DacDeviceAdd(&virtual->device);
if (ret != HDF_SUCCESS) {
// 添加DAC设备失败
HDF_LOGE("%s: add Dac controller failed! ret = %d", __func__, ret);
goto __ERR__;
}
// 成功添加DAC设备
return HDF_SUCCESS;
__ERR__:
// 如果指针为空
if (virtual != NULL) {
// 释放内存
OsalMemFree(virtual);
// 指针置空
virtual = NULL;
}
return ret;
}
static int32_t VirtualDacInit(struct HdfDeviceObject *device)
{
// 定义返回值参数
int32_t ret;
// 设备结构体子节点
const struct DeviceResourceNode *childNode = NULL;
// 入参指针进行判断
if (device == NULL || device->property == NULL) {
// 入参指针为空
HDF_LOGE("%s: device or property is NULL", __func__);
return HDF_ERR_INVALID_OBJECT;
}
// 入参指针不为空
ret = HDF_SUCCESS;
DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode) {
// 解析子节点
ret = VirtualDacParseAndInit(device, childNode);
if (ret != HDF_SUCCESS) {
// 解析失败
break;
}
}
// 解析成功
return ret;
}
static int32_t VirtualDacReadDrs(struct VirtualDacDevice *virtual, const struct DeviceResourceNode *node)
{
struct DeviceResourceIface *drsOps = NULL;
// 获取drsOps方法
drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE);
if (drsOps == NULL || drsOps->GetUint32 == NULL || drsOps->GetUint16 == NULL) {
HDF_LOGE("%s: Invalid drs ops fail!", __func__);
return HDF_FAILURE;
}
// 将配置参数依次读出,并填充至结构体中
if (drsOps->GetUint32(node, "deviceNum", &virtual->deviceNum, 0) != HDF_SUCCESS) {
HDF_LOGE("%s: Read deviceNum fail!", __func__);
return HDF_ERR_IO;
}
if (drsOps->GetUint32(node, "validChannel", &virtual->validChannel, 0) != HDF_SUCCESS) {
HDF_LOGE("%s: Read validChannel fail!", __func__);
return HDF_ERR_IO;
}
if (drsOps->GetUint32(node, "rate", &virtual->rate, 0) != HDF_SUCCESS) {
HDF_LOGE("%s: Read rate fail!", __func__);
return HDF_ERR_IO;
}
return HDF_SUCCESS;
}
```
- Release函数开发参考
入参:
HdfDeviceObject是整个驱动对外提供的接口参数,具备HCS配置文件的信息。
返回值:
无。
函数说明:
释放内存和删除控制器,该函数需要在驱动入口结构体中赋值给Release接口,当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源。
 **说明:**<br>
所有强制转换获取相应对象的操作前提是在Init函数中具备对应赋值的操作。
```c
static void VirtualDacRemoveByNode(const struct DeviceResourceNode *node)
{
// 定义返回值参数
int32_t ret;
// 定义DAC设备号
int16_t devNum;
// DAC设备结构体指针
struct DacDevice *device = NULL;
// DAC虚拟结构体指针
struct VirtualDacDevice *virtual = NULL;
// 设备资源接口结构体指针
struct DeviceResourceIface *drsOps = NULL;
// 通过实例入口获取设备资源
drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE);
// 入参指判空
if (drsOps == NULL || drsOps->GetUint32 == NULL) {
// 指针为空
HDF_LOGE("%s: invalid drs ops fail!", __func__);
return;
}
// 获取devNum节点的数据
ret = drsOps->GetUint16(node, "devNum", (uint16_t *)&devNum, 0);
if (ret != HDF_SUCCESS) {
// 获取失败
HDF_LOGE("%s: read devNum fail!", __func__);
return;
}
// 获取DAC设备号
device = DacDeviceGet(devNum);
// 判断DAC设备号以及数据是否为空
if (device != NULL && device->priv == node) {
// 为空释放DAC设备号
DacDevicePut(device);
// 移除DAC设备号
DacDeviceRemove(device);
virtual = (struct VirtualDacDevice *)device;
// 释放虚拟指针
OsalMemFree(virtual);
}
return;
}
static void VirtualDacRelease(struct HdfDeviceObject *device)
{
// 定义设备资源子节点结构体指
const struct DeviceResourceNode *childNode = NULL;
// 入参指针判空
if (device == NULL || device->property == NULL) {
// 入参指针为空
HDF_LOGE("%s: device or property is NULL", __func__);
return;
}
DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode) {
// 通过节点移除DAC
VirtualDacRemoveByNode(childNode);
}
}
```
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的测试用例是否成功等。