MIPI CSI
概述
功能简介
CSI(Camera Serial Interface)是由MIPI联盟下Camera工作组指定的接口标准。CSI-2是MIPI CSI第二版,主要由应用层、协议层、物理层组成,最大支持4通道数据传输、单线传输速度高达1Gb/s。
物理层支持HS(High Speed)和LP(Low Speed)两种工作模式。HS模式下采用低压差分信号,功耗较大,但数据传输速率可以很高(数据速率为80M~1Gbps);LP模式下采用单端信号,数据速率很低(<10Mbps),但是相应的功耗也很低。两种模式的结合保证了MIPI总线在需要传输大量数据(如图像)时可以高速传输,而在不需要传输大数据量时又能够减少功耗。
图1显示了简化的CSI接口。D-PHY采用1对源同步的差分时钟和1~4对差分数据线来进行数据传输。数据传输采用DDR方式,即在时钟的上下边沿都有数据传输。
图 1 CSI发送、接收接口
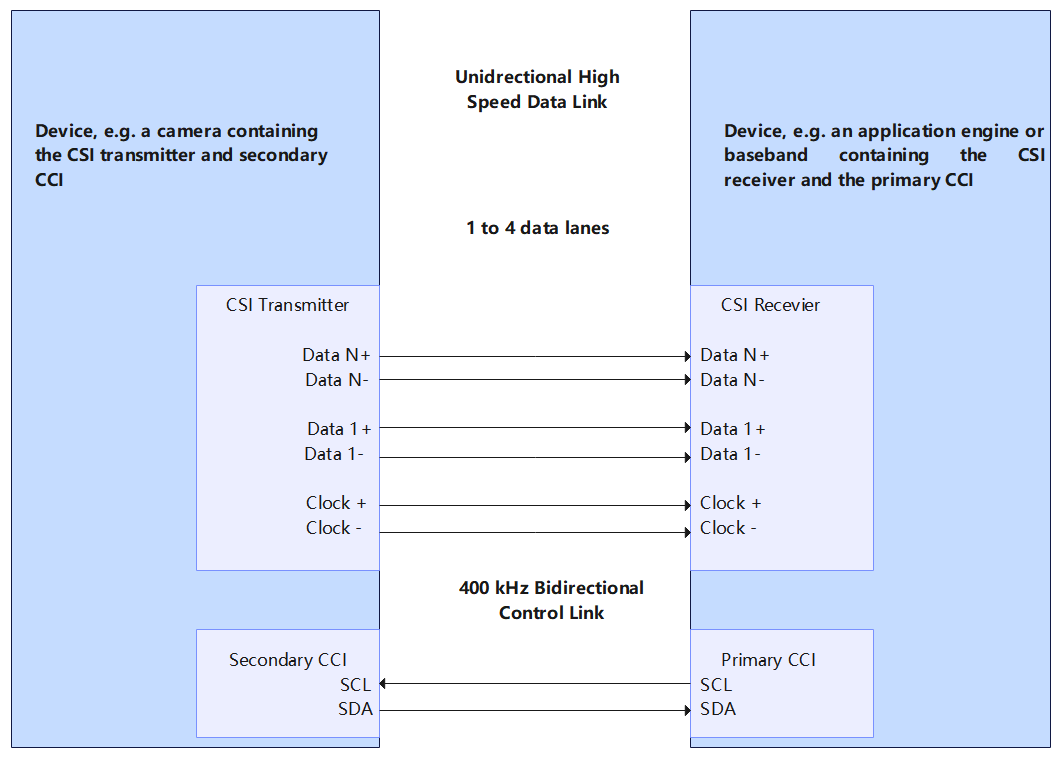
MIPI CSI标准分为应用层、协议层与物理层,协议层又细分为像素字节转换层、低级协议层、Lane管理层。
-
物理层(PHY Layer)
PHY层指定了传输媒介,在电气层面从串行bit流中捕捉“0”与“1”,同时生成SoT与EoT等信号。
-
协议层(Protocol Layer)
协议层由三个子层组成,每个子层有不同的职责。CSI-2协议能够在host侧处理器上用一个单独的接口处理多条数据流。协议层规定了多条数据流该如何标记和交织起来,以便每条数据流能够被正确地恢复出来。
- 像素字节转换层(Pixel/Byte Packing/Unpacking Layer)
CSI-2规范支持多种不同像素格式的图像应用。在发送方中,本层在发送数据到Low Level Protocol层之前,将来自应用层的像素封包为字节数据。在接收方中,本层在发送数据到应用层之前,将来自Low Level Protocol层的字节数据解包为像素。8位的像素数据在本层中传输时保持不变。
-
低级协议层(Low Level Protocol) LLP主要包含了在SoT和EoT事件之间的bit和byte级别的同步方法,以及和下一层传递数据的方法。LLP最小数据粒度是1个字节。LLP也包含了一个字节内的bit值解析,即Endian(大小端里的Endian的意思)的处理。
-
Lane管理层(Lane Management)
CSI-2的Lane是可扩展的。具体的数据Lane的数量规范并没有给出限制,具体根据应用的带宽需求而定。发送侧分发(distributor功能)来自出口方向数据流的字节到1条或多条Lane上。接收侧则从一条或多条Lane中收集字节并合并(merge功能)到一个数据流上,复原出原始流的字节顺序。对于C-PHY物理层来说,本层专门分发字节对(16 bits)到数据Lane或从数据Lane中收集字节对。基于每Lane的扰码功能是可选特性。 协议层的数据组织形式是包(packet)。接口的发送侧会增加包头(header)和错误校验(error-checking)信息到即将被LLP发送的数据上。接收侧在LLP将包头剥掉,包头会被接收器中对应的逻辑所解析。错误校验信息可以用来做入口数据的完整性检查。
-
应用层(Application Layer)
本层描述了更高层级的应用对于数据中的数据的处理,规范并不涵盖应用层。CSI-2规范只给出了像素值和字节的映射关系。
运作机制
MIPI CSI模块各分层的作用为:
-
接口层提供打开设备、写入数据和关闭设备的接口。
-
核心层主要提供绑定设备、初始化设备以及释放设备的能力。
-
适配层实现其它具体的功能。
![]() 说明:
说明:
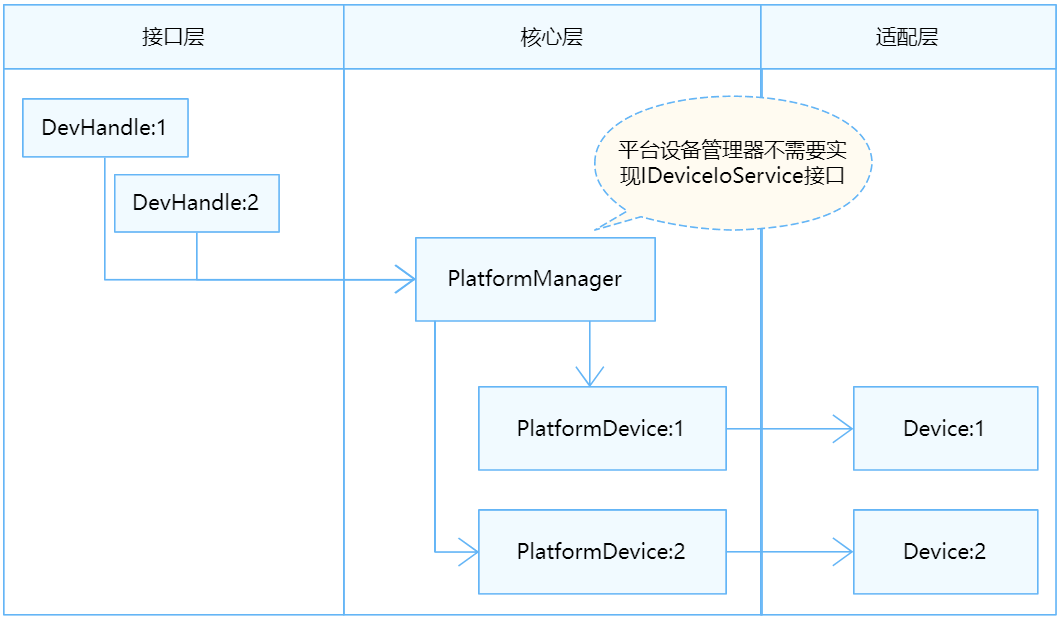
核心层可以调用接口层的函数,核心层通过钩子函数调用适配层函数,从而适配层可以间接的调用接口层函数,但是不可逆转接口层调用适配层函数。
图 2 CSI无服务模式结构图
开发指导
场景介绍
MIPI CSI仅是一个软件层面的概念,主要工作是CSI资源管理。开发者可以通过使用提供的CSI操作接口,实现对CSI资源管理。当驱动开发者需要将MIPI CSI设备适配到OpenHarmony时,需要进行MIPI CSI驱动适配,下文将介绍如何进行MIPI CSI驱动适配。
接口说明
为了保证上层在调用MIPI CSI接口时能够正确的操作硬件,核心层在//drivers/hdf_core/framework/support/platform/include/mipi/mipi_csi_core.h中定义了以下钩子函数。驱动适配者需要在适配层实现这些函数的具体功能,并与这些钩子函数挂接,从而完成接口层与核心层的交互。
MipiCsiCntlrMethod定义:
struct MipiCsiCntlrMethod {
int32_t (*setComboDevAttr)(struct MipiCsiCntlr *cntlr, ComboDevAttr *pAttr);
int32_t (*setPhyCmvmode)(struct MipiCsiCntlr *cntlr, uint8_t devno, PhyCmvMode cmvMode);
int32_t (*setExtDataType)(struct MipiCsiCntlr *cntlr, ExtDataType* dataType);
int32_t (*setHsMode)(struct MipiCsiCntlr *cntlr, LaneDivideMode laneDivideMode);
int32_t (*enableClock)(struct MipiCsiCntlr *cntlr, uint8_t comboDev);
int32_t (*disableClock)(struct MipiCsiCntlr *cntlr, uint8_t comboDev);
int32_t (*resetRx)(struct MipiCsiCntlr *cntlr, uint8_t comboDev);
int32_t (*unresetRx)(struct MipiCsiCntlr *cntlr, uint8_t comboDev);
int32_t (*enableSensorClock)(struct MipiCsiCntlr *cntlr, uint8_t snsClkSource);
int32_t (*disableSensorClock)(struct MipiCsiCntlr *cntlr, uint8_t snsClkSource);
int32_t (*resetSensor)(struct MipiCsiCntlr *cntlr, uint8_t snsResetSource);
int32_t (*unresetSensor)(struct MipiCsiCntlr *cntlr, uint8_t snsResetSource);
};
表 1 MipiCsiCntlrMethod成员的钩子函数功能说明
| 成员函数 | 入参 | 出参 | 返回状态 | 功能 |
|---|---|---|---|---|
| setComboDevAttr | cntlr:结构体指针,MipiCsi控制器 ; pAttr:结构体指针,MIPI CSI相应配置结构体指针 |
无 | HDF_STATUS相关状态 | 写入MIPI CSI配置 |
| setPhyCmvmode | cntlr:结构体指针,MipiCsi控制器 ; devno:uint8_t类型,设备编号; cmvMode:枚举类型,共模电压模式参数 |
无 | HDF_STATUS相关状态 | 设置共模电压模式 |
| setExtDataType | cntlr:结构体指针,MipiCsi控制器 ; dataType:结构体指针,定义YUV和原始数据格式以及位深度 |
无 | HDF_STATUS相关状态 | 设置YUV和RAW数据格式和位深 |
| setHsMode | cntlr:结构体指针,MipiCsi控制器 ; laneDivideMode:枚举类型,Lane模式参数 |
无 | HDF_STATUS相关状态 | 设置MIPI RX的Lane分布 |
| enableClock | cntlr:结构体指针,MipiCsi控制器 ; comboDev:uint8_t类型,通路序号 |
无 | HDF_STATUS相关状态 | 使能MIPI的时钟 |
| disableClock | cntlr:结构体指针,MipiCsi控制器 ; comboDev:uint8_t类型,通路序号 |
无 | HDF_STATUS相关状态 | 关闭MIPI的时钟 |
| resetRx | cntlr:结构体指针,MipiCsi控制器 ; comboDev:uint8_t类型,通路序号 |
无 | HDF_STATUS相关状态 | 复位MIPI RX |
| unresetRx | cntlr:结构体指针,MipiCsi控制器 ; comboDev:uint8_t类型,通路序号 |
无 | HDF_STATUS相关状态 | 撤销复位MIPI RX |
| enableSensorClock | cntlr:结构体指针,MipiCsi控制器 ; snsClkSource:uint8_t类型,传感器的时钟信号线号 |
无 | HDF_STATUS相关状态 | 使能MIPI上的Sensor时钟 |
| disableSensorClock | cntlr:结构体指针,MipiCsi控制器 ; snsClkSource:uint8_t类型,传感器的时钟信号线号 |
无 | HDF_STATUS相关状态 | 关闭MIPI上的Sensor时钟 |
| resetSensor | cntlr:结构体指针,MipiCsi控制器 ; snsClkSource:uint8_t类型,传感器的时钟信号线号 |
无 | HDF_STATUS相关状态 | 复位Sensor |
| unresetSensor | cntlr:结构体指针,MipiCsi控制器 ; snsClkSource:uint8_t类型,传感器的时钟信号线号 |
无 | HDF_STATUS相关状态 | 撤销复位Sensor |
开发步骤
MIPI CSI模块适配包含以下四个步骤:
-
实例化驱动入口
-
实例化HdfDriverEntry结构体成员。
-
调用HDF_INIT将HdfDriverEntry实例化对象注册到HDF框架中。
-
-
配置属性文件
-
在device_info.hcs文件中添加deviceNode描述。
-
【可选】添加mipi_csi_config.hcs器件属性文件。
-
-
实例化MIPI CSI控制器对象
-
初始化MipiCsiCntlr成员。
-
实例化MipiCsiCntlr成员MipiCsiCntlrMethod。
 说明:
说明:
实例化MipiCsiCntlr成员MipiCsiCntlrMethod,其定义和成员说明见接口说明。
-
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的信息反馈,数据传输的成功与否等。
开发实例
下方将基于Hi3516DV300开发板以//device/soc/hisilicon/common/platform/mipi_csi/mipi_csi_hi35xx.c驱动为示例,展示需要厂商提供哪些内容来完整实现设备功能。
-
实例化驱动入口
驱动入口必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HdfDriverEntry结构体的函数指针成员需要被驱动适配者操作函数填充,HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组,方便调用。
一般在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
MIPI CSI驱动入口参考
struct HdfDriverEntry g_mipiCsiDriverEntry = { .moduleVersion = 1, .Init = Hi35xxMipiCsiInit, // 挂接MIPI CSI模块Init实例化 .Release = Hi35xxMipiCsiRelease, // 挂接MIPI CSI模块Release实例化 .moduleName = "HDF_MIPI_RX", // 【必要且与HCS文件中里面的moduleName匹配】 }; HDF_INIT(g_mipiCsiDriverEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中 -
配置属性文件 一般来说,驱动开发首先需要新增mipi_csi_config.hcs配置文件,在其中配置器件属性,并在//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs文件中添加deviceNode描述。deviceNode与配置属性的对应关系是依靠deviceMatchAttr字段来完成的。只有当deviceNode下的deviceMatchAttr字段与配置属性文件中的match_attr字段完全相同时,驱动才能正确读取配置数据。器件属性值与核心层MipiCsiCntlr成员的默认值或限制范围有密切关系,deviceNode信息与驱动入口注册相关。
说明:
本例中MIPI控制器配置属性在源文件中,没有新增配置文件,驱动适配者如有需要,可在device_info.hcs文件的deviceNode增加deviceMatchAttr字段,同时新增mipi_csi_config.hcs文件,并使其match_attr字段与之相同。无服务模式device_info.hcs文件中设备节点也代表着一个设备对象,如果存在多个设备对象,则按需添加,注意服务名与驱动私有数据匹配的关键字名称必须唯一。其中各项参数如表2所示:
表 2 device_info.hcs节点参数说明
| 成员名 | 值 |
|---|---|
| policy | 驱动服务发布的策略,MIPI CSI控制器具体配置为0,表示驱动不需要发布服务 |
| priority | 驱动启动优先级(0-200),值越大优先级越低。MIPI CSI控制器具体配置为160 |
| permission | 驱动创建设备节点权限,MIPI CSI控制器具体配置为0664 |
| moduleName | 驱动名称,MIPI CSI控制器固定为HDF_MIPI_RX |
| serviceName | 驱动对外发布服务的名称,MIPI CSI控制器服务名设置为HDF_MIPI_RX |
| deviceMatchAttr | 驱动私有数据匹配的关键字,MIPI CSI控制器没有使用,可忽略 |
device_info.hcs配置参考
```c
root {
device_info {
match_attr = "hdf_manager";
platform :: host {
hostName = "platform_host";
priority = 50;
device_mipi_csi:: device {
device0 :: deviceNode {
policy = 0;
priority = 160;
permission = 0644;
moduleName = "HDF_MIPI_RX"; // 【必要】用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致。
serviceName = "HDF_MIPI_RX"; // 【必要且唯一】驱动对外发布服务的名称
}
}
}
}
}
```
-
实例化MIPI CSI控制器对象
完成驱动入口注册之后,最后一步就是以核心层MipiCsiCntlr对象的初始化为核心,实现HdfDriverEntry成员函数(Bind,Init,Release)。
MipiCsiCntlr对象的初始化包括驱动适配者自定义结构体(用于传递参数和数据)和实例化MipiCsiCntlr成员MipiCsiCntlrMethod(让用户可以通过接口来调用驱动底层函数)。
-
自定义结构体参考
从驱动的角度看,自定义结构体是参数和数据的载体,一般来说,config文件中的数值也会用来初始化结构体成员,本例的mipicsi器件属性在源文件中,故基本成员结构与MipiCsiCntlr无太大差异。
typedef struct { // 数据类型:8/10/12/14/16位 DataType inputDataType; // MIPI波分复用模式 MipiWdrMode wdrMode; // laneId: -1 - 禁用 short laneId[MIPI_LANE_NUM]; union { // 用于 HI_MIPI_WDR_MODE_DT short dataType[WDR_VC_NUM]; }; } MipiDevAttr; typedef struct { // 设备号 uint8_t devno; // 输入模式: MIPI/LVDS/SUBLVDS/HISPI/DC InputMode inputMode; MipiDataRate dataRate; // MIPI Rx设备裁剪区域(与原始传感器输入图像大小相对应) ImgRect imgRect; union { MipiDevAttr mipiAttr; LvdsDevAttr lvdsAttr; }; } ComboDevAttr; // MipiCsiCntlr是核心层控制器结构体,其中的成员在Init函数中会被赋值。 struct MipiCsiCntlr { // 当驱动程序绑定到HDF框架时,将发送此控制器提供的服务。 struct IDeviceIoService service; // 当驱动程序绑定到HDF框架时,将传入设备端指针。 struct HdfDeviceObject *device; // 设备号 unsigned int devNo; // 控制器提供的所有接口 struct MipiCsiCntlrMethod *ops; // 对于控制器调试的所有接口,如果未实现驱动程序,则需要null。 struct MipiCsiCntlrDebugMethod *debugs; // 控制器上下文参数变量 MipiDevCtx ctx; // 访问控制器上下文参数变量时锁定 OsalSpinlock ctxLock; // 操作控制器时锁定方法 struct OsalMutex lock; // 匿名数据指针,用于存储csi设备结构。 void *priv; }; -
MipiCsiCntlr成员钩子函数结构体MipiCsiCntlrMethod的实例化
说明:
其他成员在Init函数中初始化。static struct MipiCsiCntlrMethod g_method = { .setComboDevAttr = Hi35xxSetComboDevAttr, .setPhyCmvmode = Hi35xxSetPhyCmvmode, .setExtDataType = Hi35xxSetExtDataType, .setHsMode = Hi35xxSetHsMode, .enableClock = Hi35xxEnableClock, .disableClock = Hi35xxDisableClock, .resetRx = Hi35xxResetRx, .unresetRx = Hi35xxUnresetRx, .enableSensorClock = Hi35xxEnableSensorClock, .disableSensorClock = Hi35xxDisableSensorClock, .resetSensor = Hi35xxResetSensor, .unresetSensor = Hi35xxUnresetSensor }; -
Init函数开发参考
入参:
HdfDeviceObject是整个驱动对外暴露的接口参数,具备HCS配置文件的信息。
返回值:
HDF_STATUS相关状态 (表3为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS的定义)。
表 3 HDF_STATUS相关状态说明
-
| 状态(值) | 问题描述 |
|---|---|
| HDF_ERR_INVALID_OBJECT | 控制器对象非法 |
| HDF_ERR_MALLOC_FAIL | 内存分配失败 |
| HDF_ERR_IO | I/O 错误 |
| HDF_SUCCESS | 初始化成功 |
| HDF_FAILURE | 初始化失败 |
函数说明:
MipiCsiCntlrMethod的实例化对象的挂载,调用MipiCsiRegisterCntlr,以及其他驱动适配者自定义初始化操作。
```c
static int32_t Hi35xxMipiCsiInit(struct HdfDeviceObject *device)
{
int32_t ret;
HDF_LOGI("%s: enter!", __func__);
g_mipiCsi.priv = NULL; // g_mipiTx是定义的全局变量
// static struct MipiCsiCntlr g_mipiCsi = {
// .devNo = 0
// };
g_mipiCsi.ops = &g_method; // MipiCsiCntlrMethod的实例化对象的挂载
#ifdef CONFIG_HI_PROC_SHOW_SUPPORT
g_mipiCsi.debugs = &g_debugMethod;
#endif
ret = MipiCsiRegisterCntlr(&g_mipiCsi, device); // 【必要】调用核心层函数和g_mipiTx初始化核心层全局变量
if (ret != HDF_SUCCESS) {
HDF_LOGE("%s: [MipiCsiRegisterCntlr] failed!", __func__);
return ret;
}
ret = MipiRxDrvInit(); // 【必要】驱动适配者对设备的初始化,形式不限。
if (ret != HDF_SUCCESS) {
HDF_LOGE("%s: [MipiRxDrvInit] failed.", __func__);
return ret;
}
#ifdef MIPICSI_VFS_SUPPORT
ret = MipiCsiDevModuleInit(g_mipiCsi.devNo);
if (ret != HDF_SUCCESS) {
HDF_LOGE("%s: [MipiCsiDevModuleInit] failed!", __func__);
return ret;
}
#endif
OsalSpinInit(&g_mipiCsi.ctxLock);
HDF_LOGI("%s: load mipi csi driver success!", __func__);
return ret;
}
// mipi_csi_core.c核心层
int32_t MipiCsiRegisterCntlr(struct MipiCsiCntlr *cntlr, struct HdfDeviceObject *device)
{
......
// 定义的全局变量:static struct MipiCsiHandle g_mipiCsihandle[MAX_CNTLR_CNT];
if (g_mipiCsihandle[cntlr->devNo].cntlr == NULL) {
(void)OsalMutexInit(&g_mipiCsihandle[cntlr->devNo].lock);
(void)OsalMutexInit(&(cntlr->lock));
g_mipiCsihandle[cntlr->devNo].cntlr = cntlr; // 初始化MipiCsiHandle成员
g_mipiCsihandle[cntlr->devNo].priv = NULL;
cntlr->device = device; // 使HdfDeviceObject与MipiCsiHandle可以相互转化的前提
device->service = &(cntlr->service); // 使HdfDeviceObject与MipiCsiHandle可以相互转化的前提
cntlr->priv = NULL;
HDF_LOGI("%s: success.", __func__);
return HDF_SUCCESS;
}
HDF_LOGE("%s: cntlr already exists.", __func__);
return HDF_FAILURE;
}
```
- Release函数开发参考
入参:
HdfDeviceObject是整个驱动对外暴露的接口参数,具备HCS配置文件的信息。
返回值:
无
函数说明:
该函数需要在驱动入口结构体中赋值给Release接口,当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源,该函数中需包含释放内存和删除控制器等操作。
> **说明:**<br>
>所有强制转换获取相应对象的操作前提是在Init函数中具备对应赋值的操作。
```c
static void Hi35xxMipiCsiRelease(struct HdfDeviceObject *device)
{
struct MipiCsiCntlr *cntlr = NULL;
......
cntlr = MipiCsiCntlrFromDevice(device); // 这里有HdfDeviceObject到MipiCsiCntlr的强制转化
// return (device == NULL) ? NULL : (struct MipiCsiCntlr *)device->service;
......
OsalSpinDestroy(&cntlr->ctxLock);
#ifdef MIPICSI_VFS_SUPPORT
MipiCsiDevModuleExit(cntlr->devNo);
#endif
MipiRxDrvExit(); // 【必要】对设备所占资源的释放
MipiCsiUnregisterCntlr(&g_mipiCsi); // 空函数
g_mipiCsi.priv = NULL;
HDF_LOGI("%s: unload mipi csi driver success!", __func__);
}
```
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的信息反馈。