PWM
概述
功能简介
PWM(Pulse Width Modulation)即脉冲宽度调制,是一种对模拟信号电平进行数字编码并将其转换为脉冲的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。通常情况下,在使用马达控制、背光亮度调节时会用到PWM模块。
基本概念
脉冲是“电脉冲”的简称,指电路中电流或电压短暂起伏的现象,其特点是突变和不连续性。脉冲的种类很多,常见的脉冲波形有:三角脉冲、尖脉冲、矩形脉冲、方形脉冲、梯形脉冲及阶梯脉冲等。脉冲的主要参数包括重复周期T(T=1/F,F为重复频率)、脉冲幅度U、脉冲前沿上升时间ts、后沿下降时间t、脉冲宽度tk等。
运作机制
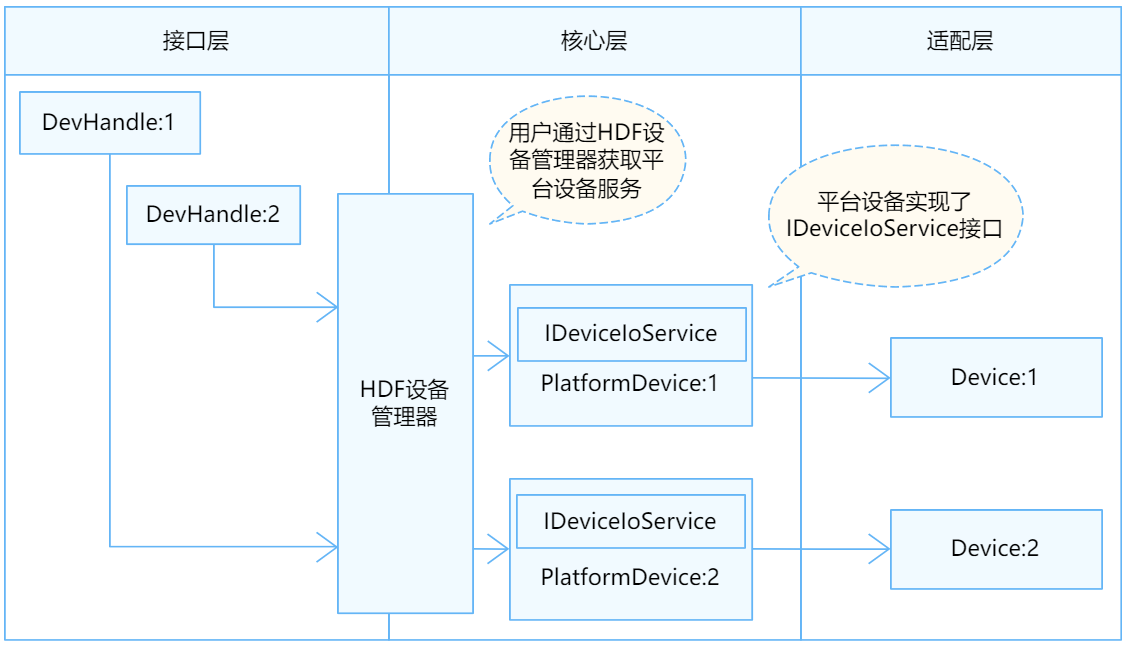
在HDF框架中,PWM接口适配模式采用独立服务模式(如图1所示)。在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDF设备管理器的服务管理能力,但需要为每个设备单独配置设备节点,增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
-
驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
-
device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
PWM模块各分层作用:
-
接口层提供打开PWM设备、设置PWM设备周期、设置PWM设备占空时间、设置PWM设备极性、设置PWM设备参数、获取PWM设备参数、使能PWM设备、禁止PWM设备、关闭PWM设备的接口。
-
核心层主要提供PWM控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互。
-
适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 1 PWM独立服务模式结构图
开发指导
场景介绍
PWM用于脉冲宽度调制,当驱动开发者需要将PWM设备适配到OpenHarmony时,需要进行PWM驱动适配。下文将介绍如何进行PWM驱动适配。
接口说明
为了保证上层在调用PWM接口时能够正确的操作PWM控制器,核心层在//drivers/hdf_core/framework/support/platform/include/pwm/pwm_core.h中定义了以下钩子函数,驱动适配者需要在适配层实现这些函数的具体功能,并与钩子函数挂接,从而完成适配层与核心层的交互。
PwmMethod定义:
struct PwmMethod {
int32_t (*setConfig)(struct PwmDev *pwm, struct PwmConfig *config);
int32_t (*open)(struct PwmDev *pwm);
int32_t (*close)(struct PwmDev *pwm);
};
表 1 PwmMethod结构体成员的钩子函数功能说明
| 成员函数 | 入参 | 返回值 | 功能 |
|---|---|---|---|
| setConfig | pwm:结构体指针,核心层PWM控制器 config:结构体指针,传入设置得设备属性 |
HDF_STATUS相关状态 | 配置属性 |
| open | pwm:结构体指针,核心层PWM控制器 | HDF_STATUS相关状态 | 打开PWM设备 |
| close | pwm:结构体指针,核心层PWM控制器 | HDF_STATUS相关状态 | 关闭PWM设备 |
开发步骤
PWM模块适配包含以下四个步骤:
-
驱实例化驱动入口
-
配置属性文件
-
实例化PWM控制器对象
-
驱动调试
开发实例
下方将基于Hi3516DV300开发板以//device/soc/hisilicon/common/platform/pwm/pwm_hi35xx.c驱动为示例,展示需要驱动适配者提供哪些内容来完整实现设备功能。
-
驱实例化驱动入口
驱动入口必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。
一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
PWM驱动入口开发参考:
struct HdfDriverEntry g_hdfPwm = { .moduleVersion = 1, .moduleName = "HDF_PLATFORM_PWM", // 【必要且与HCS文件中里面的moduleName匹配】 .Bind = HdfPwmBind, // 挂接PWM模块Bind实例化 .Init = HdfPwmInit, // 挂接PWM模块Init实例化 .Release = HdfPwmRelease, // 挂接PWM模块Release实例化 }; HDF_INIT(g_hdfPwm); // 调用HDF_INIT将驱动入口注册到HDF框架中 -
配置属性文件
完成驱动入口注册之后,需要在device_info.hcs文件中添加deviceNode信息,deviceNode信息与驱动入口注册相关。本例以两个PWM控制器为例,如有多个器件信息,则需要在device_info.hcs文件增加对应的deviceNode信息,以及在pwm_config.hcs文件中增加对应的器件属性。器件属性值与核心层PwmDev成员的默认值或限制范围有密切关系,比如PWM设备号,需要在pwm_config.hcs文件中增加对应的器件属性。
独立服务模式的特点是device_info.hcs文件中设备节点代表着一个设备对象,如果存在多个设备对象,则按需添加,注意服务名与驱动私有数据匹配的关键字名称必须唯一。其中各项参数如表2所示:
表 2 device_info.hcs节点参数说明
| 成员名 | 值 |
|---|---|
| policy | 驱动服务发布的策略,PWM控制器具体配置为2,表示驱动对内核态和用户态都发布服务 |
| priority | 驱动启动优先级(0-200),值越大优先级越低。PWM控制器具体配置为80 |
| permission | 驱动创建设备节点权限,PWM控制器具体配置为0664 |
| moduleName | 驱动名称,PWM控制器固定为HDF_PLATFORM_PWM |
| serviceName | 驱动对外发布服务的名称,PWM控制器服务名设置为HDF_PLATFORM_PWM_X,X代表PWM控制器编号 |
| deviceMatchAttr | 驱动私有数据匹配的关键字,PWM控制器设置为hisilicon_hi35xx_pwm_X,X代表PWM控制器编号 |
- device_info.hcs 配置参考:
在//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs文件中添加deviceNode描述。
```c
root {
device_info {
platform :: host {
hostName = "platform_host";
priority = 50;
device_pwm :: device { // 为每一个PWM控制器配置一个HDF设备节点
device0 :: deviceNode {
policy = 2; // policy字段是驱动服务发布的策略,如果需要面向用户态,则为2
priority = 80; // 驱动启动优先级
permission = 0644; // 驱动创建设备节点权限
moduleName = "HDF_PLATFORM_PWM"; // 【必要】用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致
serviceName = "HDF_PLATFORM_PWM_0"; // 【必要且唯一】驱动对外发布服务的名称
deviceMatchAttr = "hisilicon_hi35xx_pwm_0"; // 【必要】用于配置控制器私有数据,要与pwm_config.hcs中对应控制器保持一致,具体的控制器信息在pwm_config.hcs中
}
device1 :: deviceNode {
policy = 2;
priority = 80;
permission = 0644;
moduleName = "HDF_PLATFORM_PWM";
serviceName = "HDF_PLATFORM_PWM_1";
deviceMatchAttr = "hisilicon_hi35xx_pwm_1";
}
...... // 如果存在多个PWM设备时【必须】添加节点,否则不用
}
}
}
}
```
- pwm_config.hcs 配置参考
在//device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/pwm/pwm_config.hcs文件配置器件属性,其中配置参数如下:
```c
root {
platform {
pwm_config {
template pwm_device { // 【必要】配置模板,如果下面节点使用时继承该模板,则节点中未声明的字段会使用该模板中的默认值
serviceName = "";
match_attr = "";
num = 0; // 【必要】设备号
base = 0x12070000; // 【必要】地址映射需要
}
device_0x12070000 :: pwm_device { // 存在多个设备时,请逐一添加相关HDF节点和设备节点信息。
match_attr = "hisilicon_hi35xx_pwm_0"; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致
}
device_0x12070020 :: pwm_device {
match_attr = "hisilicon_hi35xx_pwm_1";
num = 1;
base = 0x12070020; // 【必要】地址映射需要
}
...... // 如果存在多个PWM设备时【必须】添加节点,否则不用
}
}
}
```
需要注意的是,新增pwm_config.hcs配置文件后,必须在产品对应的hdf.hcs文件中将其包含如下语句所示,否则配置文件无法生效。
```c
#include "../../../../device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/pwm/pwm_config.hcs" // 配置文件相对路径
```
-
实例化PWM控制器对象
完成驱动入口注册之后,下一步就是以核心层PwmDev对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化PwmDev成员PwmMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind、Init、Release)。
-
驱动适配者自定义结构体参考。
从驱动的角度看,驱动适配者自定义结构体是参数和数据的载体,而且pwm_config.hcs文件中的数值会被HDF读入并通过DeviceResourceIface来初始化结构体成员,一些重要数值也会传递给核心层对象,例如PWM设备号。
struct HiPwm { struct PwmDev dev; // 【必要】 核是核心层控制对象 volatile unsigned char *base; // 【必要】地址映射需要,寄存器基地址 struct HiPwmRegs *reg; // 设备属性结构体,可自定义。 bool supportPolarity; // 是否支持极性 }; struct PwmDev { // PwmDev是核心层控制器结构体,其中的成员在Init函数中会被赋值。 struct IDeviceIoService service; // 驱动服务 struct HdfDeviceObject *device; // 驱动设备对象 struct PwmConfig cfg; // 设备属性结构体,相关定义见下。 struct PwmMethod *method; // 钩子函数 bool busy; // 是否繁忙 uint32_t num; // 设备号 OsalSpinlock lock; // 自旋锁 void *priv; // 私有数据 }; struct PwmConfig { // PWM设备属性 uint32_t duty; // 占空时间 nanoseconds uint32_t period; // pwm 周期 nanoseconds uint32_t number; // pwm 连续个数 uint8_t polarity; // Polarity // ------------------- | -------------- // PWM_NORMAL_POLARITY | Normal polarity // PWM_INVERTED_POLARITY | Inverted polarity // uint8_t status; // 运行状态 // ------------------ | ----------------- // PWM_DISABLE_STATUS | Disabled // PWM_ENABLE_STATUS | Enabled }; -
PwmDev成员钩子函数结构体PwmMethod的实例化,其他成员在Init函数中初始化。
struct PwmMethod g_pwmOps = { // pwm_hi35xx.c中的示例:钩子函数实例化 .setConfig = HiPwmSetConfig, // 配置属性 }; -
Init函数开发参考
入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
HDF_STATUS相关状态(表3为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS定义)。
表 3 HDF_STATUS相关状态说明
-
| 状态(值) | 问题描述 |
|---|---|
| HDF_ERR_INVALID_OBJECT | 控制器对象非法 |
| HDF_ERR_MALLOC_FAIL | 内存分配失败 |
| HDF_ERR_INVALID_PARAM | 参数非法 |
| HDF_ERR_IO | I/O 错误 |
| HDF_SUCCESS | 初始化成功 |
| HDF_FAILURE | 初始化失败 |
函数说明:
初始化自定义结构体对象,初始化PwmDev成员,调用核心层PwmDeviceAdd函数,完成PWM控制器的添加。
```c
// 此处Bind函数为空函数,可与Init函数结合,也可根据驱动适配者需要实现相关操作。
static int32_t HdfPwmBind(struct HdfDeviceObject *obj)
{
(void)obj;
return HDF_SUCCESS;
}
static int32_t HdfPwmInit(struct HdfDeviceObject *obj)
{
int ret;
struct HiPwm *hp = NULL;
......
hp = (struct HiPwm *)OsalMemCalloc(sizeof(*hp));
......
ret = HiPwmProbe(hp, obj); // 【必要】实现见下
......
return ret;
static int32_t HiPwmProbe(struct HiPwm *hp, struct HdfDeviceObject *obj)
{
uint32_t tmp;
struct DeviceResourceIface *iface = NULL;
iface = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE); // 初始化自定义结构体HiPwm
......
hp->reg = (struct HiPwmRegs *)hp->base; // 初始化自定义结构体HiPwm
hp->supportPolarity = false; // 初始化自定义结构体HiPwm
hp->dev.method = &g_pwmOps; // PwmMethod的实例化对象的挂载
hp->dev.cfg.duty = PWM_DEFAULT_DUTY_CYCLE; // 初始化PwmDev
hp->dev.cfg.period = PWM_DEFAULT_PERIOD; // 初始化PwmDev
hp->dev.cfg.polarity = PWM_DEFAULT_POLARITY; // 初始化PwmDev
hp->dev.cfg.status = PWM_DISABLE_STATUS; // 初始化PwmDev
hp->dev.cfg.number = 0; // 初始化PwmDev
hp->dev.busy = false; // 初始化PwmDev
if (PwmDeviceAdd(obj, &(hp->dev)) != HDF_SUCCESS) { // 【重要】调用核心层函数,初始化hp->dev的设备和服务。
OsalIoUnmap((void *)hp->base);
return HDF_FAILURE;
}
return HDF_SUCCESS;
}
```
- Release函数开发参考
入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
无。
函数说明:
释放内存和删除控制器,该函数需要在驱动入口结构体中赋值给Release接口,当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源。
```c
static void HdfPwmRelease(struct HdfDeviceObject *obj)
{
struct HiPwm *hp = NULL;
......
hp = (struct HiPwm *)obj->service; // 这里有HdfDeviceObject到HiPwm的强制转化
......
PwmDeviceRemove(obj, &(hp->dev)); // 【必要】调用核心层函数,释放PwmDev的设备和服务,这里有HiPwm到PwmDev的强制转化。
HiPwmRemove(hp); // 释放HiPwm
}
```
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如PWM控制状态等。