Parameter Management
Overview
Function Introduction
The parameter management module, namely, sysparam, provides an easy-to-use key-value pair access interface for system services to configure service functions based on their own system parameters.
System Parameter Definition
Each subsystem defines the system parameters of its own modules, including the system parameter name, default value, and access permission information.
System Parameter Definition File
-
The system parameter definition file ends with the .para extension. An example of the file format is as follows:
const.product.name=OHOS-PRODUCT const.os.version.api=26 const.telephony.enable=false|true
System Parameter Name (Key)
-
Naming format
A system parameter name consists of multiple segments in dotted notation. Each segment can be a string that consists of letters, digits, and underscores (_). The total length cannot exceed 96 bytes. System parameter names are categorized into the following two types.
Naming of system parameters
| Category | Name | Example | Description |
|---|---|---|---|
| Parameter | Parameter Name | const.product.name | Complete system parameter name. It does not end with a period (.). |
| Directory | Parameter Directory | const.**. | Name of the directory storing system parameters with the same prefix. It ends with a period (.). |
-
Type
System parameters are categorized into three types.
System parameter types
| Category | Prefix | Description |
|---|---|---|
| Constant | const. | Constant parameter, which will not be changed once a value is assigned. The value can contain a maximum of 4,096 bytes (including the terminator). |
| Writable | Others | Writable parameter, which will be lost after system restart. The value can contain a maximum of 96 bytes (including the terminator). |
| Persistent | persist. | Writable and persistent parameter, which will not be lost after system restart. The value can contain a maximum of 96 bytes (including the terminator). |
The general naming format is as follows:
[ const | persist ].$sub_system.$desc
$sub_system is the name of the subsystem or module.
$desc indicates the description of a system parameter. The description can contain multiple segments in dotted notation.
System Parameter Value
- Types
Types of system parameter values
| Category | Example | Description |
|---|---|---|
| String | const.product.name=OHOS-PRODUCT | A multi-line string must be enclosed in double quotation marks (""). |
| Number | const.os.version.api=26 | Numbers do not need to be enclosed in quotation marks. |
| Boolean | const.telephony.enable=false | A Boolean value can be 0, 1, false, or true. |
System Parameter Permission Configuration
DAC and MAC are supported.
Default Permission
If no DAC or MAC permission has been defined for a system parameter, the default permission is as follows:
| [DAC] User | [DAC] Group | [DAC] UGO | [MAC] SELinux Label |
|---|---|---|---|
| root | root | 775 | default_param |
Other processes access system parameters with the default permission as follows:
| Operation | System Native Process | System Application Process | Third-party Application Process |
|---|---|---|---|
| get | Allowed | Allowed | Allowed |
| watch | Allowed | Allowed | Allowed |
| set | Not allowed | Not allowed | Not allowed |
DAC Permission Configuration
-
DAC definition file
Currently, the control of system parameter access permissions is implemented in discretionary access control (DAC) mode. The access permission definition file ends with the .para.dac extension. It is available in the /base/startup/init/services/etc/param/ohos.para.dac directory of the init module. The following is an example of the file content:
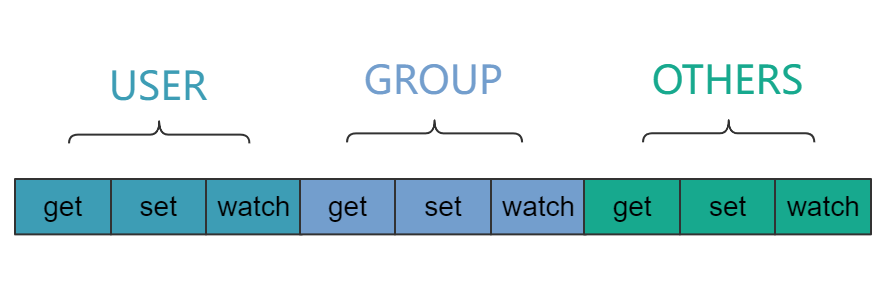
const.product. = root:root:0775 persist.init. = root:root:0775 startup.appspawn. = root:root:0750 startup.uevent. = ueventd:ueventd:0775As shown above, we can use parameter directory to define the same access permission for system parameters with the same prefix. The DAC information is divided into three segments, user, group, and UGO rule, which are separated using a semicolon (:).
The following figure shows the structure of the UGO rule.
Figure 1 UGO rule structure
MAC Permission Configuration
-
SELinux tag
To add a SELinux tag to system parameters, you first need to define the tag in the /base/security/selinux_adapter/sepolicy/base/public/parameter.te file. For example:
type servicectrl_param, parameter_attrAfter the tag is defined, add the system parameter prefix associated with the tag to /base/security/selinux_adapter/sepolicy/base/public/parameter_contexts. The following uses the prefix ohos.servicectrl as an example:
ohos.servicectrl. u:object_r:servicectrl_param:s0 -
Grant operation permissions. For example, to grant operation permissions such as map for the init process, add the following content to the /base/security/selinux/sepolicy/ohos_policy/startup/init/public/init.te file:
allow servicectrl_param tmpfs:filesystem associate; allow init servicectrl_param:file { map open read relabelto relabelfrom }; -
Set the write permission. For example, grant the system parameter write permission for services such as init, samgr, and hdf_devmgr.
allow { init samgr hdf_devmgr } servicectrl_param:parameter_service { set }; -
Set the read permission. If you want to grant the permission only for certain services, replace xxx with the services in the following code:
allow { xxx } servicectrl_param:file { map open read }; -
If you want to grant the permission for all services, use the following code:
allow { domain -limit_domain } servicectrl_param:file { map open read };
Basic Requirements for System Parameter Permissions
The system parameters mapping to a SELinux tag take up an independent shared memory area. It is recommended that system parameters of the same type share a SELinux tag to reduce the overhead of the system shared memory.
Take the sample component as an example. You are advised to add the following types of tags for access control:
a) For open read-only system parameters, use **default_param** instead of defining new tags. .
b) For writable system parameters, add the **{component}_writable_param** tag.
c) For readable system parameters (privacy data) within a component, add the **[optional]{component}_private_param** tag.
System Parameter Tag Configuration
Configuring the Size of the System Parameter Tag File
By default, 1 KB memory is allocated to each tag, which can store about five system parameters. If a large number of system parameters are supported under a tag, expand the memory size for the tag in the ohso.para.size file.
This can be done through either /system/etc/param/ohos.para.size or /sys_prod/etc/param/ohos.para.size.
The configuration rule is as follows:
System parameter tag = Size
Example:
devinfo_public_param=30720
hilog_param=40960
Default shared memory size of system parameters: 80 KB
Description of System Parameter Tags
The init process creates the corresponding shared memory mapping file in the /dev/parameters/ directory based on the system parameter tag. The shared memory is used to store the system parameters bound to the tag.
Example of a shared memory file:
-rwxr-xr-- 1 root root 30720 2017-08-10 16:22 u:object_r:default_param:s0
-rwxr-xr-- 1 root root 1024 2017-08-10 16:22 u:object_r:devinfo_private_param:s0
-rwxr-xr-- 1 root root 30720 2017-08-10 16:22 u:object_r:devinfo_public_param:s0
-rwxr-xr-- 1 root root 40960 2017-08-10 16:22 u:object_r:hilog_param:s0
The system parameter tags are defined in the /base/security/selinux_adapter/sepolicy/base/public/parameter.te file.
System parameter tag definition:
type default_param, parameter_attr;
type devinfo_private_param, parameter_attr;
type devinfo_public_param, parameter_attr;
type hilog_param, parameter_attr;
The mappings between system parameter tags and system parameters are defined in the /base/security/selinux_adapter/sepolicy/base/public/parameter_contexts file.
The following uses the hilog_param tag as an example:
hilog. u:object_r:hilog_param:s0 # System parameters with the hilog. prefix are stored in the shared memory corresponding to the hilog_param tag.
persist.sys.hilog. u:object_r:hilog_param:s0 # System parameters with the persist.sys.hilog. prefix are also stored in the shared memory corresponding to the hilog_param tag.
Checking Shared Memory Usage of System Parameters
You can run the **param dump [verbose]** command to query the shared memory usage of system parameters.
The following is an example of the query result:
```
Dump all parameters begin ...
Local security information
pid: 1612 uid: 0 gid: 0
map file: u:object_r:default_param:s0 // Name of the system parameter tag (name of the shared memory mapping file)
total size: 10485720 // Size of the system parameter tag file (size of the shared memory mapped to the tag)
first offset: 0 // Offset of the first parameter node
current offset: 15948 // Offset of the current parameter node
total node: 242 // Total number of nodes in the tag
total param node: 219 // Total number of parameter nodes
total security node: 0 // Number of SELinux nodes
commitId : 26 //
commitPersistId : 0 //
node info: // Information about all nodes under the tag
... ...
```
System Parameter Loading
The following table describes the sequence of loading system parameters.
| Category | Path | Description |
|---|---|---|
| Kernel parameters | /proc/cmdline | Convert some values of kernel parameters into system parameters. Specifically, convert all ohospara.xxx=valXXX parameters to ohos.boot.xxx=valXXX parameters. |
| OS system parameters | /system/etc/param/ohos_const/*.para | Load the definition file containing OS constants preferentially. |
| Vendor parameters | /vendor/etc/param/*.para | Load the system parameters defined by vendors with the secondary priority. |
| System parameters | /system/etc/param/*.para | Load the parameters defined by each subsystem. If a system parameter already exists, ignore it. |
| Persistent parameters | /data/parameters/ | If persistent parameters exist, load them at last. Persistent parameters will overwrite the default system parameters that have been loaded. |
Parameter and Tag Viewing
Currently, parameter and tag statistics are recorded in the database by subsystem and component. You can set up the OpenHarmony real-time architecture information collection and analysis system to view the statistics.
For details about how to set up the system, see the Analyser Module for OpenHarmony real-time architecture information analysis.
For details about how to collect database information, see the Collector Module for OpenHarmony real-time architecture information collection.
You can also obtain the database from the daily dayu200-db build.
Basic System Parameter Operations
Operation primitives for system parameters

Description of operation primitives
| Function | Description |
|---|---|
| get | Obtains the value of a system parameter. |
| set | Sets the value of a system parameter. |
| wait | Waits for value change of a system parameter synchronously. |
| watch | Observes value change of a system parameter asynchronously. |
Constraints
The service management module is available only for the mini system and standard system.
How to Develop
Overview
You can set specific system parameters as needed to meet your service demand.
APIs
-
Shell commands
You can manage system parameters by using shell commands. This operation mode is available only for the standard system. The following table lists the shell commands.
Table 6 Description of shell commands
| Function | Description |
|---|---|
| param get [key] | Obtains the system parameter value of the specified key. If no key name is specified, all system parameter values will be returned. |
| param set key value | Sets the specified value for the specified key. |
| param wait key value | Waits for the system parameter value of the specified key to match the specified value. Fuzzy match is supported. For example, indicates any value, and val indicates matching of only the first three val characters. |
-
syspara APIs
The following table lists the APIs used to obtain system parameter values. The return result is a const string and the free operation is not supported.
Table 7 Description of syspara APIs
| API | Description |
|---|---|
| int GetParameter(const char* key, const char* def, char* value, unsigned int len) | Obtains system parameters. |
| int SetParameter(const char* key, const char* value) | Sets or updates system parameters. |
| const char* GetDeviceType(void) | Obtains the device type. |
| const char* GetManufacture(void) | Obtains the device manufacturer. |
| const char* GetBrand(void) | Obtains the device brand. |
| const char* GetMarketName(void) | Obtains the device marketing name. |
| const char* GetProductSeries(void) | Obtains the device series name. |
| const char* GetProductModel(void) | Obtains the device authentication model. |
| const char* GetSoftwareModel(void) | Obtains the device software model. |
| const char* GetHardwareModel(void) | Obtains the device hardware model. |
| const char* GetHardwareProfile(void) | Obtains the device hardware profile. |
| const char* GetSerial(void) | Obtains the device serial number (SN). |
| const char* GetOSFullName(void) | Obtains the operating system name. |
| const char* GetDisplayVersion(void) | Obtains the software version visible to users. |
| const char* GetBootloaderVersion(void) | Obtains the bootloader version of this device. |
| const char* GetSecurityPatchTag(void) | Obtains the security patch tag. |
| const char* GetAbiList(void) | Obtains the list of application binary interfaces (ABIs) supported on this device. |
| int GetSdkApiVersion(void) | Obtains the SDK API level that matches the current system software. |
| int GetFirstApiVersion(void) | Obtains the first SDK API level of the system software. |
| const char* GetIncrementalVersion(void) | Obtains the incremental version. |
| const char* GetVersionId(void) | Obtains the version ID. |
| const char* GetBuildType(void) | Obtains the build type. |
| const char* GetBuildUser(void) | Obtains the build account user name. |
| const char* GetBuildHost(void) | Obtains the build host name. |
| const char* GetBuildTime(void) | Obtains the build time. |
| const char* GetBuildRootHash(void) | Obtains the buildroot hash value of this version. |
| const char* GetOsReleaseType(void) | Obtains the system release type. |
| int GetDevUdid(char *udid, int size) | Obtains the device identifier (UDID). |
| const char *AclGetSerial(void); | Obtains the device SN (with ACL check). |
| int AclGetDevUdid(char *udid, int size); | Obtains the UDID (with ACL check). |
Procedure
-
System parameter definition
You can define default system parameters and implement permission control on them by configuring the subsystem or product .para and .para.dac files.
On a standard system, use the ohos_prebuilt_para template to install the configuration file to the /etc/param/ directory. The following is an example of the GN script:
import("//base/startup/init/services/etc/param/param_fixer.gni") ohos_prebuilt_para("ohos.para") { source = "//base/startup/init/services/etc/ohos.para" part_name = "init" module_install_dir = "etc/param" } ohos_prebuilt_para("ohos.para.dac") { source = "//base/startup/init/services/etc/ohos.para.dac" part_name = "init" module_install_dir = "etc/param" }On a small system, run the copy command to copy the corresponding system parameter definition file to the system/etc/param directory.
copy("ohos.para") { sources = [ "//base/startup/init/services/etc/param/ohos.para" ] outputs = [ "$root_out_dir/system/etc/param/ohos.para" ] } copy("ohos.para.dac") { sources = [ "//base/startup/init/services/etc/param/ohos.para.dac" ] outputs = [ "$root_out_dir/system/etc/param/ohos.para.dac" ] }On a mini system, convert all defined default system parameters into header files through action and compile them into the system.
action("lite_const_param_to") { script = "//base/startup/init/scripts/param_cfg_to_code.py" args = [ "--source", rebase_path( "//base/startup/init/services/etc_lite/param/ohos_const/ohospara"), "--dest_dir", rebase_path("$root_out_dir/gen/init/"), "--priority", "0", ] outputs = [ "$target_gen_dir/${target_name}_param_cfg_to_code.log" ] } -
Development example
// set && get char key1[] = "rw.sys.version"; char value1[] = "10.1.0"; int ret = SetParameter(key1, value1); char valueGet1[128] = {0}; ret = GetParameter(key1, "version=10.1.0", valueGet1, 128); // get sysparm char* value1 = GetDeviceType(); printf("Product type =%s\n", value1); char* value2 = GetManufacture(); printf("Manufacture =%s\n", value2); char* value3 = GetBrand(); printf("GetBrand =%s\n", value3); char* value4 = GetMarketName(); printf("MarketName =%s\n", value4); char* value5 = GetProductSeries(); printf("ProductSeries =%s\n", value5); char* value6 = GetProductModel(); printf("ProductModel =%s\n", value6); char* value7 = GetSoftwareModel(); printf("SoftwareModel =%s\n", value7); char* value8 = GetHardwareModel(); printf("HardwareModel =%s\n", value8); char* value9 = GetHardwareProfile(); printf("Software profile =%s\n", value9); char* value10 = GetSerial(); printf("Serial =%s\n", value10); char* value11 = GetOSFullName(); printf("OS name =%s\n", value11); char* value12 = GetDisplayVersion(); printf("Display version =%s\n", value12); char* value13 = GetBootloaderVersion(); printf("bootloader version =%s\n", value13); char* value14 = GetSecurityPatchTag(); printf("secure patch level =%s\n", value14); char* value15 = GetAbiList(); printf("abi list =%s\n", value15); int value16 = GetFirstApiVersion(); printf("first api level =%d\n", value16); char* value17 = GetIncrementalVersion(); printf("Incremental version = %s\n", value17); char* value18 = GetVersionId(); printf("formal id =%s\n", value18); char* value19 = GetBuildType(); printf("build type =%s\n", value19); char* value20 = GetBuildUser(); printf("build user =%s\n", value20); char* value21 = GetBuildHost(); printf("Build host = %s\n", value21); char* value22 = GetBuildTime(); printf("build time =%s\n", value22); char* value23 = GetBuildRootHash(); printf("build root later..., %s\n", value23); char* value24 = GetOsReleaseType(); printf("OS release type =%s\n", value24); char* value25 = GetOsReleaseType(); printf("OS release type =%s\n", value25); char value26[65] = {0}; GetDevUdid(value26, 65); printf("device udid =%s\n", value26);
System Parameter Error Codes
Description of system parameter error codes
| Enum | Value | Description |
|---|---|---|
| PARAM_CODE_ERROR | -1 | System error. |
| PARAM_CODE_SUCCESS | 0 | Operation success. |
| PARAM_CODE_INVALID_PARAM | 100 | Empty input parameter of the system parameter API. |
| PARAM_CODE_INVALID_NAME | 101 | Invalid length or invalid characters in the system parameter key. |
| PARAM_CODE_INVALID_VALUE | 102 | Invalid length or invalid characters in the system parameter value. |
| PARAM_CODE_REACHED_MAX | 103 | Number of tree nodes reaching the maximum. |
| PARAM_CODE_NOT_SUPPORT | 104 | API not supported. |
| PARAM_CODE_TIMEOUT | 105 | Server access timed out. |
| PARAM_CODE_NOT_FOUND | 106 | Parameter not found. |
| PARAM_CODE_READ_ONLY | 107 | System parameter read-only. |
| PARAM_CODE_IPC_ERROR | 108 | IPC communication error. |
| PARAM_CODE_NODE_EXIST | 109 | System parameter node already exists. |
| PARAM_WATCHER_CALLBACK_EXIST | 110 | Watcher callback repeatedly added. |
| PARAM_WATCHER_GET_SERVICE_FAILED | 111 | Failed to obtain the service for watcher. |
| PARAM_CODE_MEMORY_MAP_FAILED | 112 | Failed to create the shared memory mapping for a file. |
| PARAM_WORKSPACE_NOT_INIT | 113 | Workspace not initialized. |
| PARAM_CODE_FAIL_CONNECT | 114 | Failed to connect to paramServer. |
| PARAM_CODE_MEMORY_NOT_ENOUGH | 115 | Insufficient system parameter space. |
| DAC_RESULT_INVALID_PARAM | 1000 | Unused code, which defines the start value of permission errors. |
| DAC_RESULT_FORBIDED | 1001 | DAC permission disabled. |
| SELINUX_RESULT_FORBIDED | 1002 | SELinux permission disabled. |
| PARAM_CODE_MAX | 1003 | Maximum enum value. |
Key Logs for Locating Errors
-
system parameter set:
SetParameter failed! the errNum is: xx!
SystemSetParameter failed! name is : xxx, errNum is: xx!
-
system parameter get:
GetParameter_ failed! the errNum is: xx!
SystemReadParam failed! name is: xxxx, errNum is: xx!
-
system parameter wait:
WaitParameter failed! the errNum is: xx!
SystemWaitParameter failed! name is: xxx, errNum is: xx!
-
system parameter Watcher:
WatchParameter failed! the errNum is xx!
SystemWatchParameter is failed! keyPrefix is:xxx, errNum is:xx!
FAQs
How to Set a System Parameter
-
On the shell side, run hdc shell to launch the shell CLI of the device, and then run **param set param.key.**system parameter key param.value.system parameter value to set the system parameter. If the operation is successful, no further processing is required.
-
On the application side, call SetParameter to set the system parameter. For details, see APIs.
-
If param set fails, locate the fault based on the log.
If the fault is due to insufficient DAC permissions, declare the required permissions by referring to DAC Permission Configuration.
If the fault is due to insufficient SELinux permissions, grant the required permissions by referring to the avc: denied alarm information.
If the fault is due to insufficient memory, expand the memory by referring to System Parameter Tag Configuration.
How to Read a System Parameter
-
On the shell side, run hdc shell to launch the shell CLI of the device, and then run **param get param.key.**system parameter key to obtain the system parameter. If the operation is successful, no further processing is required.
-
On the application side, call GetParameter to obtain the system parameter. For details, see APIs.
-
If param get fails, locate the fault based on the log.
Check whether the parameter has been set. If yes, go to the next step. If no, set the system parameter.
If the fault is due to insufficient DAC permissions, declare the required permissions by referring to DAC Permission Configuration.
If the fault is due to insufficient SELinux permissions, grant the required permissions by referring to the avc: denied alarm information.
How to Subscribe to System Parameter Changes
-
On the shell side, run hdc shell to launch the shell CLI of the device, and then run param shell to switch to the parameter shell CLI. Run **watcher parameter param.key.**system parameter key to subscribe to changes of the system parameter. If there is a change in the system parameter, a message similar to "Receive parameter commit 691 change aaa.aaa 11111" is received.
-
On the application side, call WatchParameter to subscribe to changes of the system parameter. For details, see APIs.
-
If watcher parameter fails, locate the fault based on the log.
If the fault is due to insufficient DAC permissions, declare the required permissions by referring to DAC Permission Configuration.
If the fault is due to insufficient SELinux permissions, grant the required permissions by referring to the avc: denied alarm information.
How to Enable Third-Party Applications to Access System Parameters
The default DAC rules grant only the get and watch permissions for third-party applications. If a third-party application requires the set permission, you need to reset DAC rules. In addition, SELinux permissions of third-party applications are left unspecified by default. If needed, set the SELinux permissions by referring to the MAC Permission Configuration.